The TDoA Toolkit (TTK1000) is a complete development platform for a TDoA (Time Difference of Arrival) RTLS solution. The current TTK1000 kit includes:
Hardware kit with 10 TDoA anchors and 20 DWM1001-DEV based tags
Design files Altium CAD, schematics and Gerber files
All source code, Anchor and Tag embedded firmware and PC code for the central location engine in particular
The TTK1000 system includes UWB wireless clock synchronisation IP.
A royalty-free user’s license for the use of the above IP for volume production and mass deployment.
The TTK1000 should not be considered as a turnkey RTLS system, but as a development foundation for customers who wish to make their own TDoA products and systems: It typically reduces the R&D time from an average of 3 years down to 1 year (exact figures depend on the resources and expertise you have available with respect to networking and radio).
The TTK1000 price is $25,000. (Price reduced to $15,000 September 2020)
Thank you very much for your reply. I am sending synchronous signals continuously at an interval of 2ms. What I want to ask is whether the transmission interval of 2ms will lead to unstable information received by ordinary anchor nodes.Because now I can receive the first synchronization signal, but I can not necessarily receive the second synchronization signal after 2ms
2ms is too fast to send synchronous signal, you get no time to send blink message. You can increase interval to 100ms or even ~200ms to see if 2ms cause unstable.
Also you can take a look at DW1000 API examples code below.
ex_02a_simple_rx and
ex_01a_simple_tx
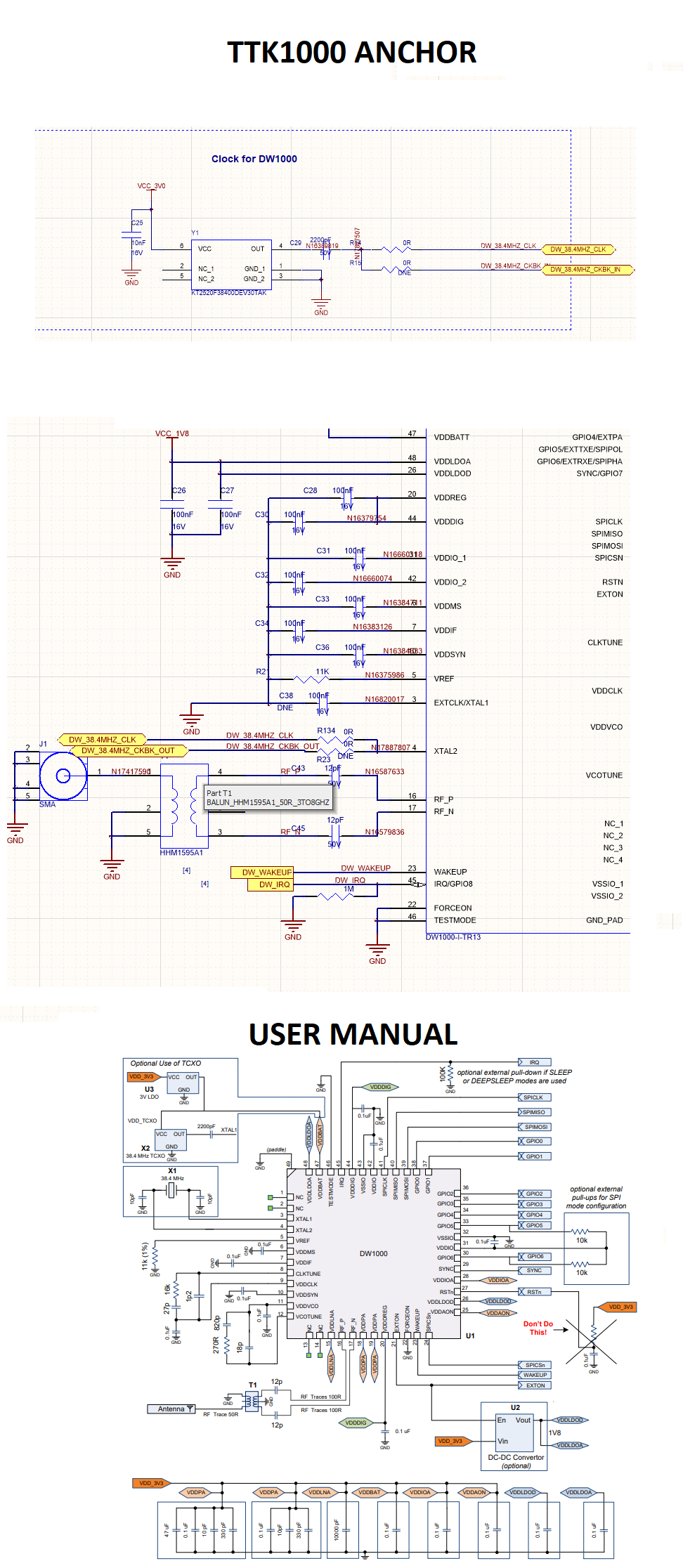
Please see the picture attached with the Schematic implemented for the anchor of the TTK1000 vs the Recommended circuit from the DW1000 Datasheet
So the questions are:
Actually the Anchors of the kit and alo the anchors that we have desigden using the same schematics works really well but:
Why the TXCO is Connected to the XTAL2 pin (Instead of XTAL1 as is recommended in the datasheet)?
Is this a design error, or connect the TXCO to XTAL2 it was totally intentional by some not described reason.
3 Should we fix this and connect the TXCO to XTAL1 instead of XTAL2 for next design release?