Zout to NISM: Output Impedance to Non-Invasive Stability Measurement
There are a couple of very interesting posts evaluating control loop stability on this forum.
- Fast FRA implementation (perhaps not as fast as .bode) posted by @physicboy
- Winslow Impedance Probe posted by @frank.wiedmann
- Stb analysis like Cadence Virtouso posted by @Heisenberg
…and let me add one more.
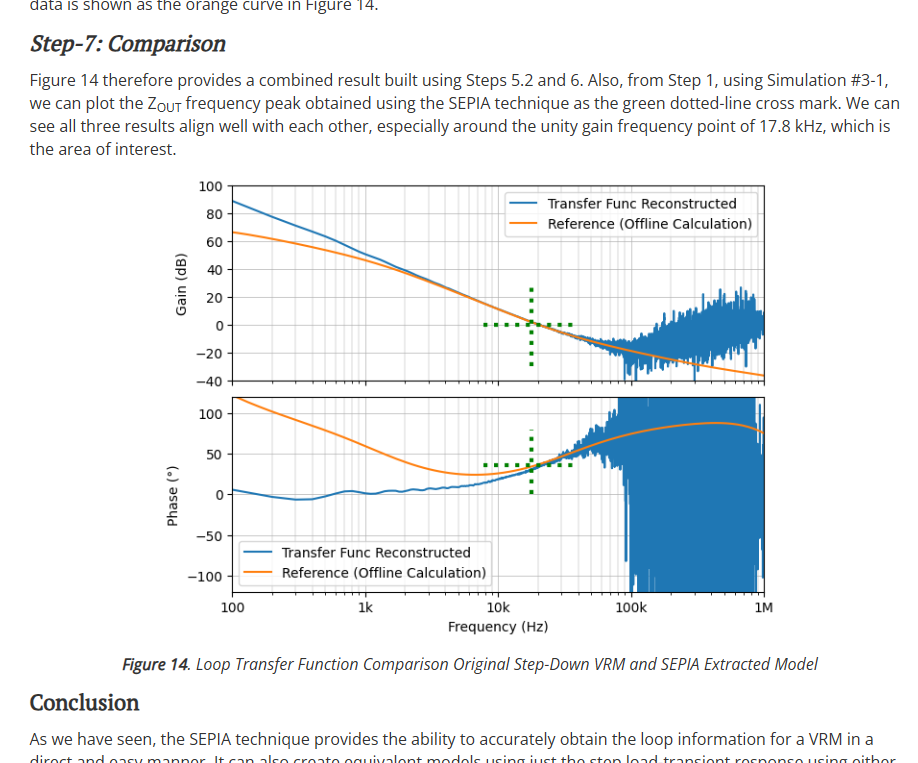
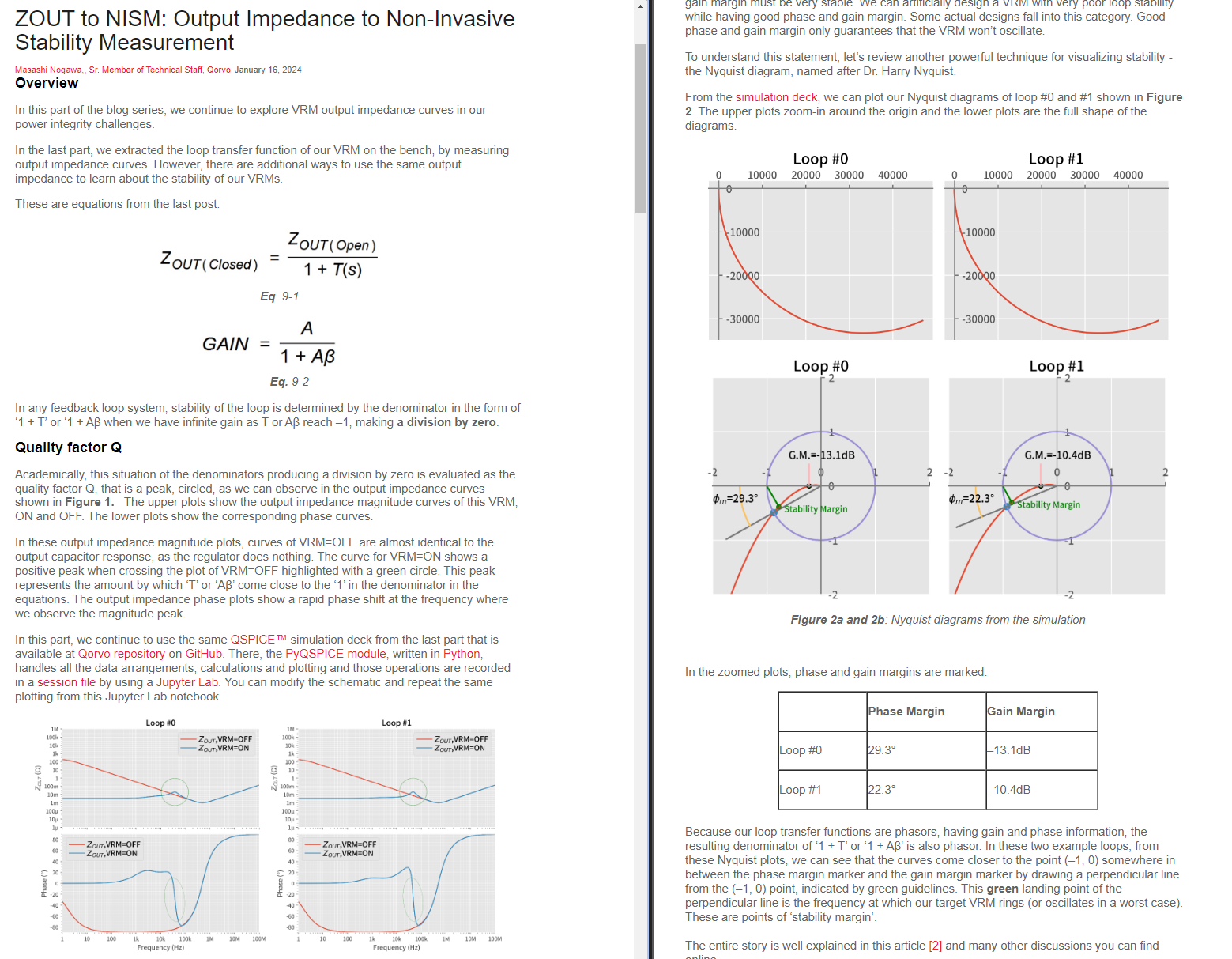
My new article (part-9) is live now, at Microwave Journal, by using PyQSPICE shown in this post, that explains output impedance Zout to non-invasive stability measurement NISM.
The beauty of this method is that we can execute an actual measurement, in the same way we simulate, when our PCB is ready on the bench.
==> That’s the naming of “non-invasive” on your board.
FYI, the Part-8 and Part-9 of my posts are summarized on my Jupyter Lab notebook and this illustrates power of Python scripting for an entire engineering report writing ![]() .
.