Zerokey has a location technology based on ultrasonic measurements. Since the speed of sound is a million times slower than radio waves, you can very precisely time the audio waves and thus have high accuracy. This comes with a host of limitations such as large tag size, low locate capacity, short battery life, environmental influence, small working volume, etc, so UWB still wins generally in many ways.
Zerokey produced a video purporting to show the natural difference in performance between their system and UWB, apparently using Sewio as the reference system:
The punch line is this image showing Zerokey (white) versus UWB (red):
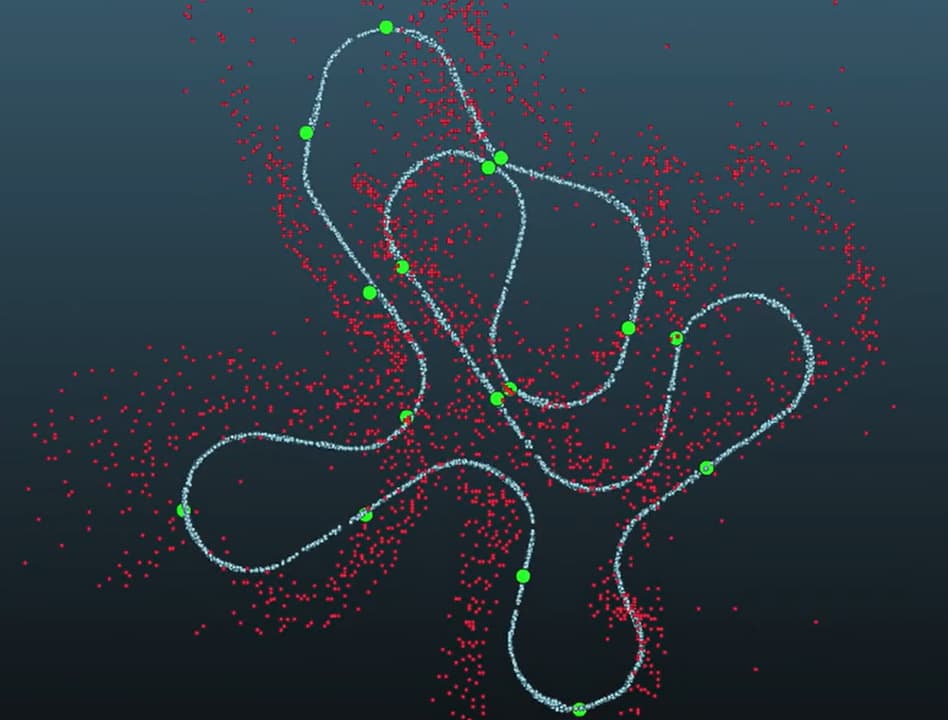
The UWB looks horrible, often not even within 1 meter of truth. That looks so bad that I have to believe they set up the UWB wrong in some way.
We decided to set up a test, using the same train, to show off our CUWB system performance doing a similar task:
And here is our results, the track path shown is +/- 5 cm from ideal:
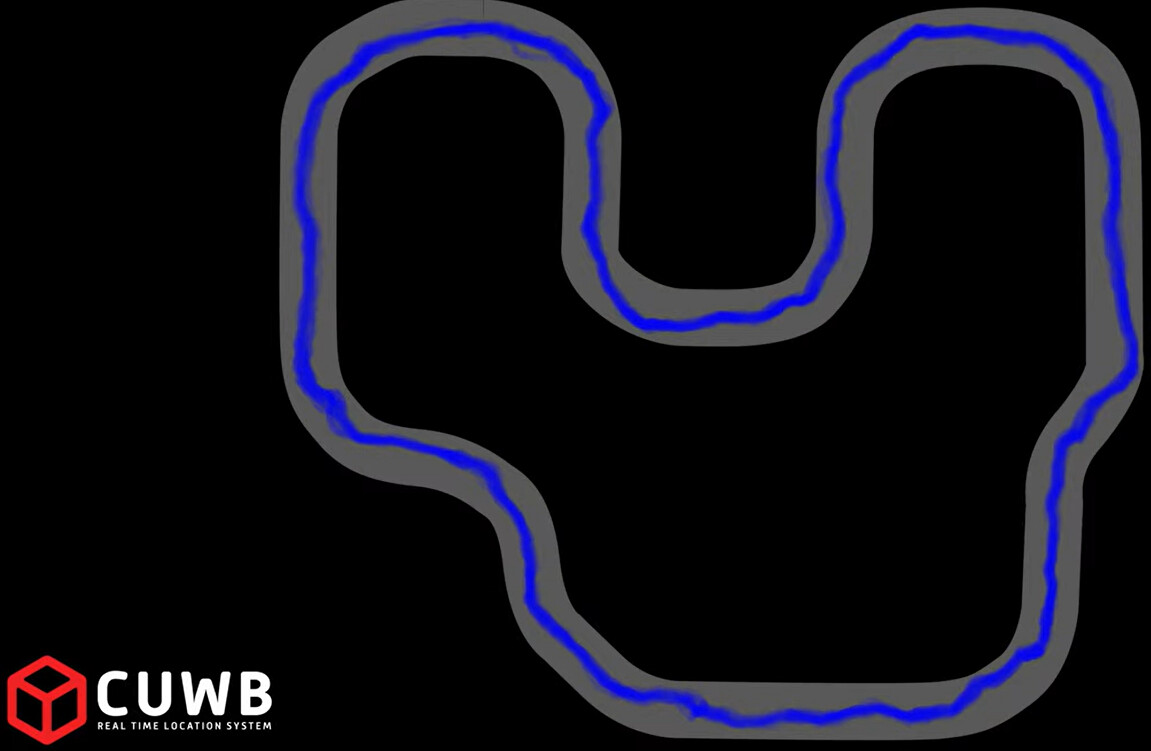
The Zerokey system is more accurate, but UWB can get much closer than they show in their video. Their video is misleading as to the true capability of UWB.
Our video was with 18 anchors, 100 Hz tag, smoothed 200 ms. At those settings, I believe the system has more locate capacity and longer tag battery life than Zerokey.
Mike Ciholas, President, Ciholas, Inc
3700 Bell Road, Newburgh, IN 47630 USA
mikec@ciholas.com
