I was wondering about TWR scheme used in PANS2. After reading the APS013, I found this
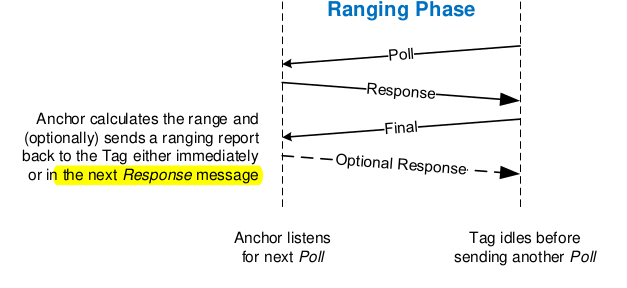
Asymmetric TWR often describe in the image attached. Based on the image, the ones who know the Time of Flight should have been the responder (anchor). The application note APS013 said that Anchor is indeed the one who calculate the range, and it sends the result back to the tag in the next response message.
My question is:
Is the anchor the ones who know the Time of Flight? Does this mean the anchor the ones who calculates the range?
it is said that the ranging result sent by the anchor on the next response message, which means it gets the result on the NEXT ranging phase? And most important question is this mean the location data is lagged by one update? (detrimental on low update rate)
Additional question, why this scheme is called “asymmetrical” double sided two way ranging? I can’t see the difference compared to the normal double-sided TWR.
Warning: I am going by memory here so I may be completely wrong.
I believe PANS uses a 4 anchor single sided TWR system.
The tag sends an initiation message that includes the IDs of 4 anchors.
Each of those 4 anchors sends a reply after a fixed delay, the delay being based on their location in the list of IDs.
The tag receives those replies. Since it knows the ID order it knows the delay added by the anchor. This means it can calculate the ranges using standard single sided TWR methods.
This gives 4 single sided TWR measurements in 5 radio packets rather than the 8 that would be needed using point to point methods ot the 12 or 16 needed for conventional point to point double sided TWR.
Thanks AndyA, your explanation made some sense when I cross check it to TDMA TWR in PANS.
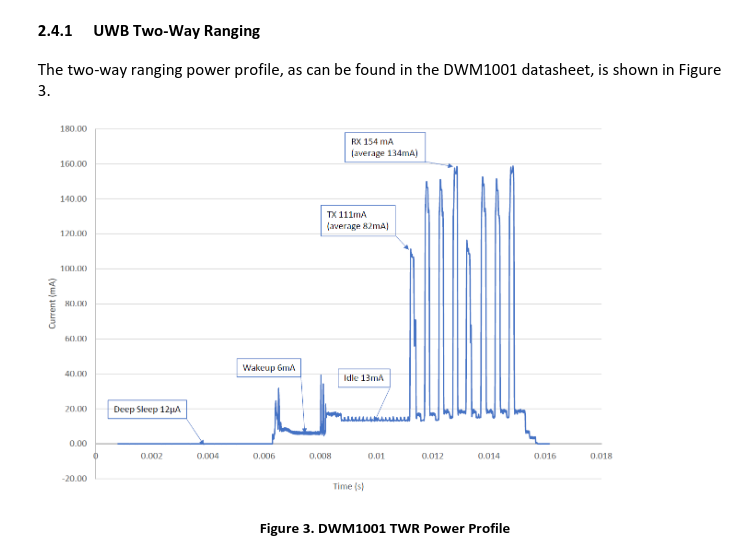
However, I don’t think PANS uses single sided TWR, since in APH011 the battery consumption goes like this (it has 1 TX, then 3 RX (because it uses 3 anchor), then 1 TX, then 3 RX)
It could be. Or it could be measuring twice and averaging, that would probably give better results than a single DS TWR.
This is more a question for @leapslabs, they wrote PANS and so are the ones to ask about details like this.