And used almost the same code mentioned to get the value of tag from pi using UART.
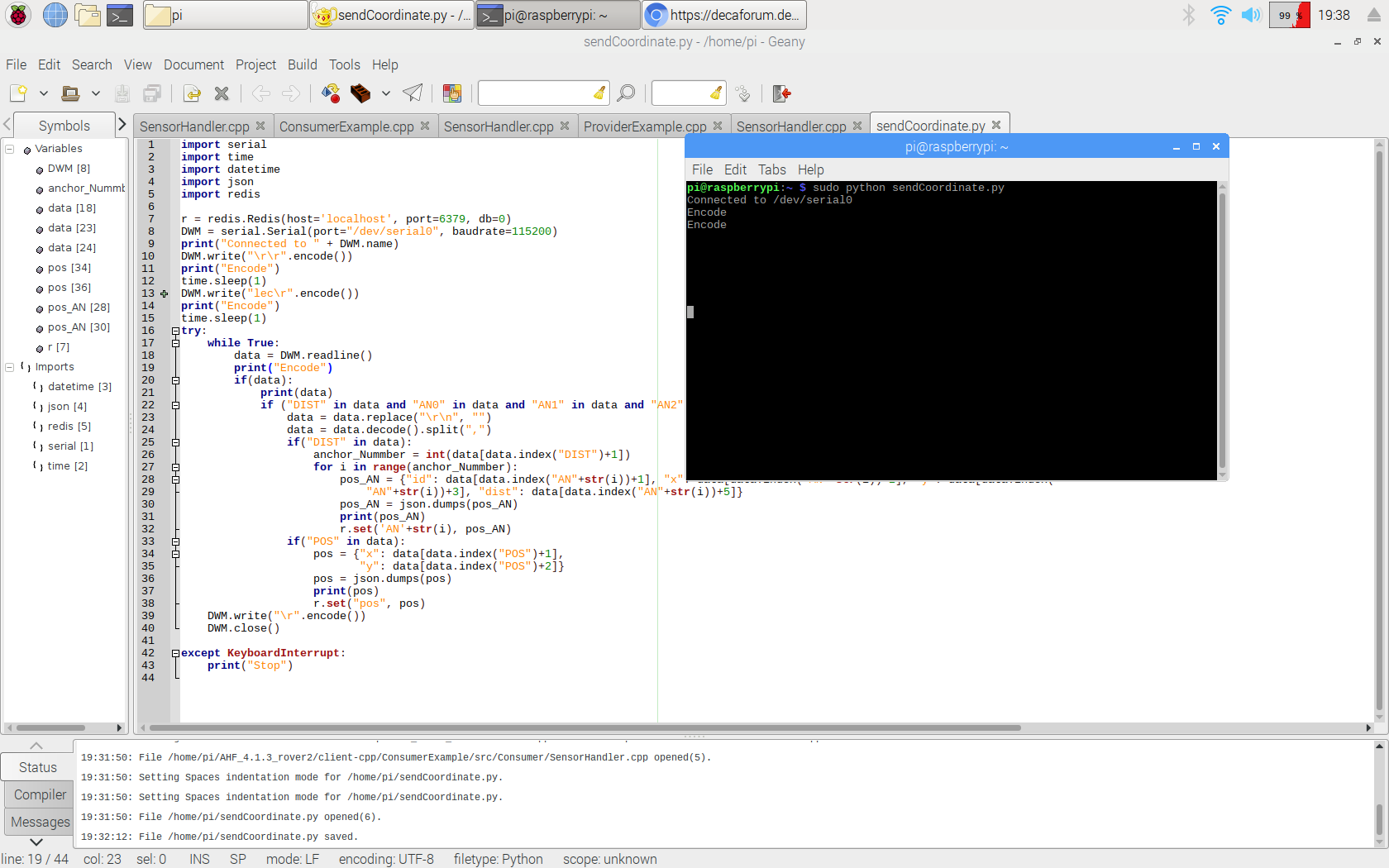
When I am running attached python files, after the message connected to /dev/serial0 the terminal is stuck but I am able to see the coordinates of the tag using the Andriod app. And also to use the shell mode, is it needed to flash the image which actually sets the pi as a gateway. My requirement is just to read the location using pi. Not sure what is the issue and how to achieve the goal of reading the coordinates. ( Attaching the python script for reference ) trial.py (865 Bytes)
Most likely something going wrong during the parsing stage. Try printing the line just after reading it and look at the output. You should see the values, then you can modify the parsing code to read the format correctly. I wrote the code on an earlier version so things may be different now.
No, you shouldn’t need to use the gateway image if you are using shell mode.
Hello @brianh, thank you for the response. I did try to print after reading it. There is no response once it enters the loop. And I am using generic mode which is default as of now. Tried using shell mode but i don’t think minicom works well because it always hangs once i receive welcome to minicom message.
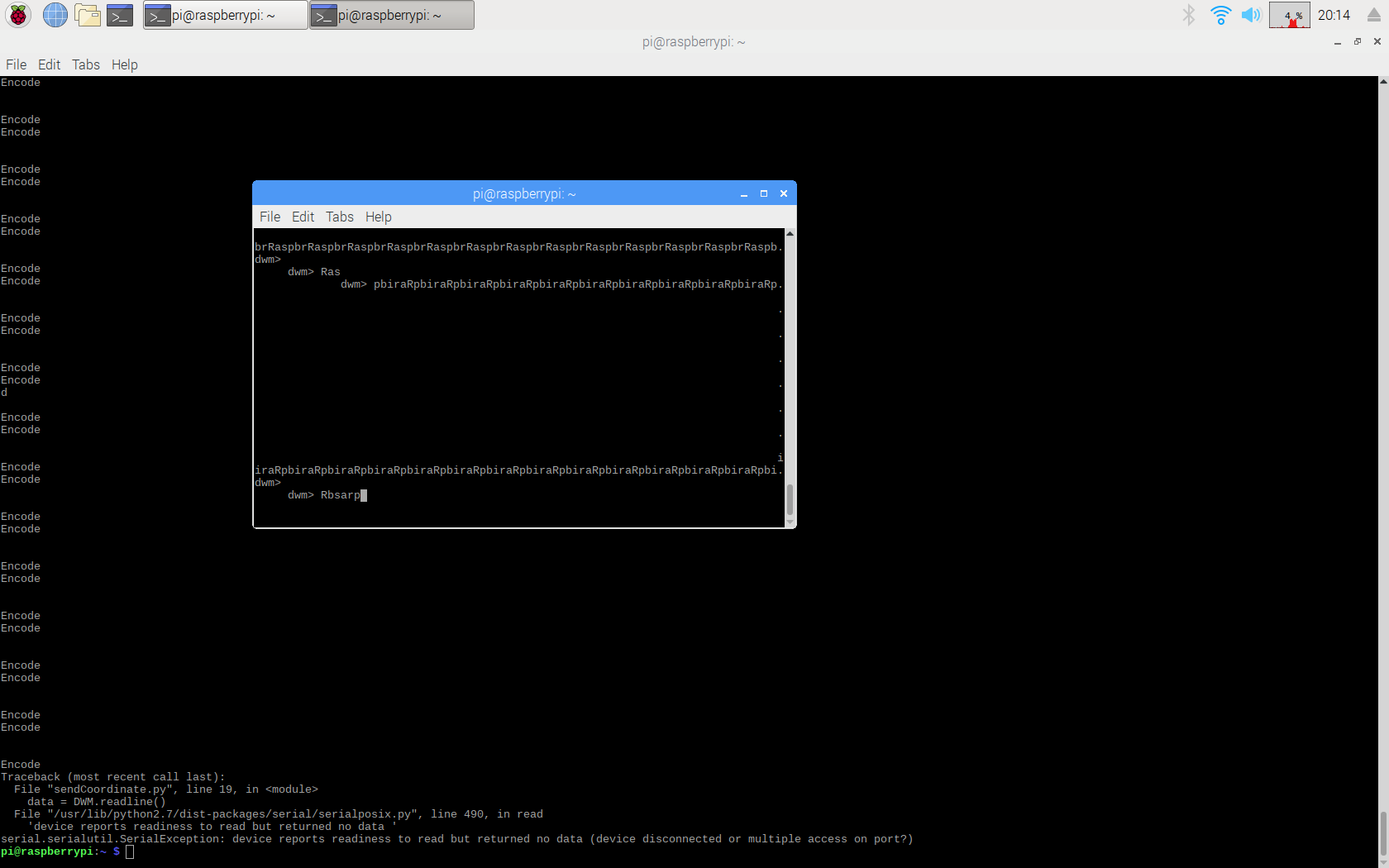
one weird observation that i observed. There might be something I might be missing .
Started minicom and the shell mode just started randomly shooting on the terminal and that got reflected while i was running the python script.
Few queries:
Do I need to configure tag as passive or active under the configuration for UWB.
2.Do I need to configure the shell mode to receive data from the python script which according to my understanding runs in generic mode.
I am connecting the Pi to DWM1001 module using UART Tx and Rx pins as shown in the attachment and regarding the port , I am connecting Pi using USB to the PC and serial0 port is used righ t ?
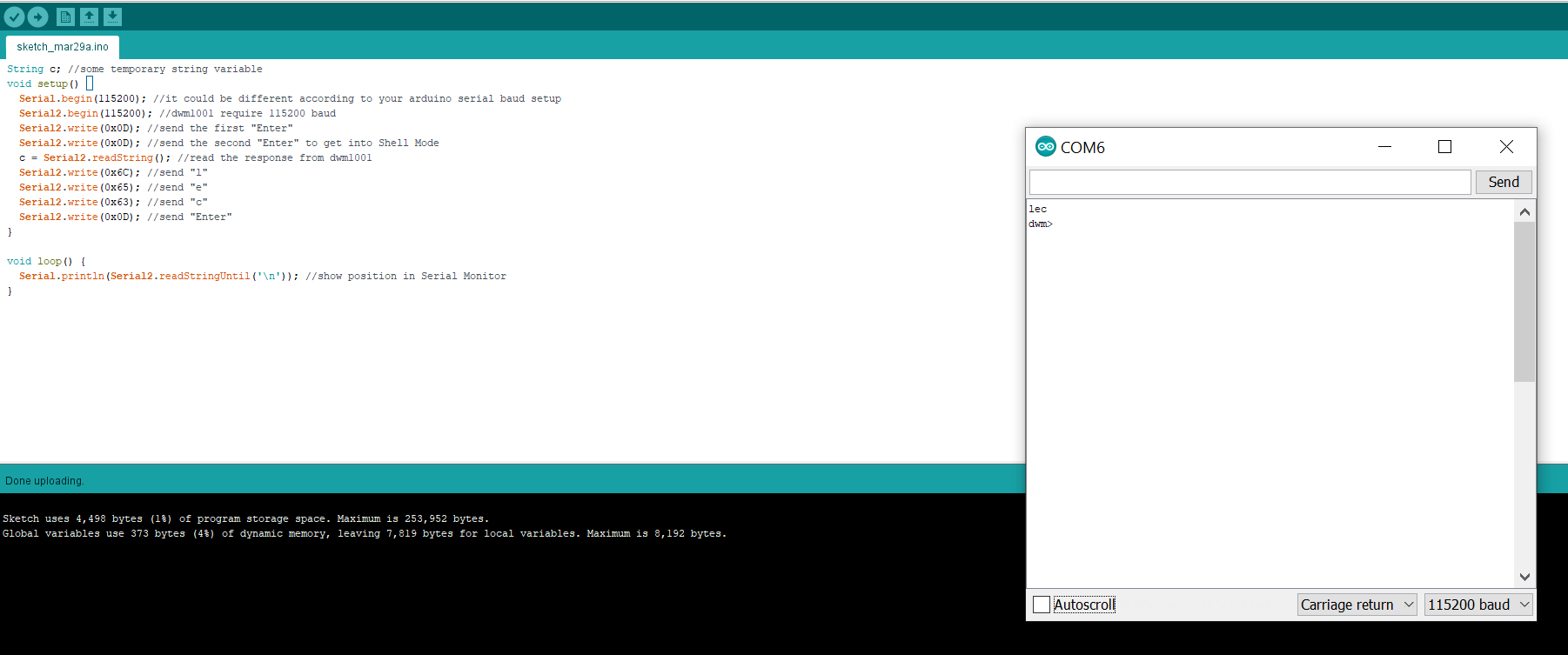
Please let me know if anyone have successfully extracted values from dwm1001 module using UART either from pi or arduino because i tried many time on pi and it wasn’t successful. I checked with loopback in Pi and it was working, with that I made sure UART is working and then I went connecting dwm1001 and pi and there wasn’t any communication and that made me to switch to aurdino mega and try accessing position data using UART connecting ( rx2 and tx2 pins) and it wasn’t successful as well. Note: i am able to get the position data from the app)