Hi all
I’m currently trying to reduce the variation of the distance calculated with asymmetric DS TWR.
I’m currently using a custom DW3220-based UWB node (The git repo for it can be found at https://github.com/ETH-PBL/UWB_DualAntenna_AoA) for a project.
I have done some modifications to the firmware presented in the repo such as reducing the transmission delay to 1 ms and performing proper antenna calibration, in order to improve on the readings. As a result, over a test of one minute, the mean of the measurements stabilize to be around ±10 of the true value.
However, the variation is still quite large, where the distance measurements can vary by around ±50 cm. This is shown in the plot below.
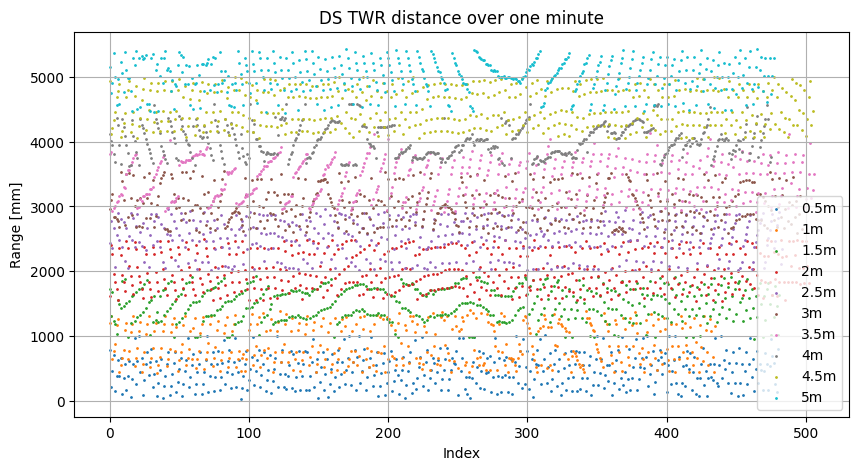
I have seen a lot of material that suggests the DW3220 should have precision within ±10 cm, so I assumed the variance would be smaller.
I have seen a lot of applications notes regarding how to improve the mean using antenna calibration and limiting the effects of clock drift by using smaller and equal transmission delay times, but none about reducing the variation.
So finally my question is: What parameters should I adjust to improve the variation? Would a longer preamble help? higher transmission power? Lower data rate? Or is it just normal to have such a large variation in your DS TWR measurements?
Finally, here is my configuration settings, if they are of interest
static dwt_config_t config = {
5,
DWT_PLEN_128,
DWT_PAC8,
9,
9,
1,
DWT_BR_6M8,
DWT_PHRMODE_STD,
DWT_PHRRATE_STD,
(129 + 8 - 8),
(DWT_STS_MODE_1 | DWT_STS_MODE_SDC),
DWT_STS_LEN_256,
DWT_PDOA_M3
};
In advance, than you for your help.