This is purely information from some tests for those who may be interested.
We have our own DW1000 based positioning system (not PANS or anything like the example code). We have always used a double sided two way ranging in order to get the best accuracy possible.
I recently added an option into the system to fall back to single sided ranging if packets are getting lost, since DS ranging requires more packets it’s more susceptible to jamming / packet loss issues. We’ve had issues where this has led to a significant performance hit and so being able to fall back to a more robust system has some big benefits.
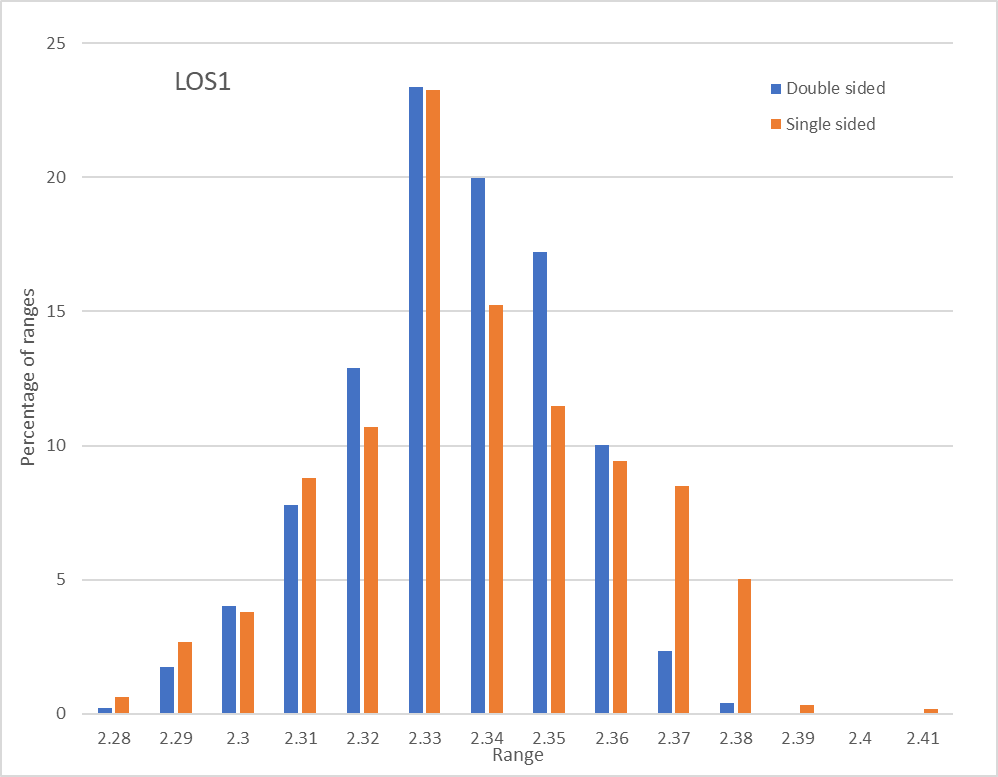
Adding this allows me to make a comparison between DS Vs SS ranging accuracy for the exact same hardware at the same time and with all the same correction factors. The firmware alternates between the two methods, 1 single sided followed by 4 double sided and then a short pause before repeating.
The single sided reply period is around 1 ms. The only thing not completely standard is that the anchor also measures the clock difference and sends that value back in its reply, the tag then uses the average of it’s and the anchors clock difference measurements when calculating the clock rate correction to apply. No additional filtering / smoothing is used on this, I’m not tracking clock errors over time.
Since this was a quick bench test I don’t have a truth measurement but our average range is generally +/- 2cm from truth so that is the level of repeatability I was looking for…
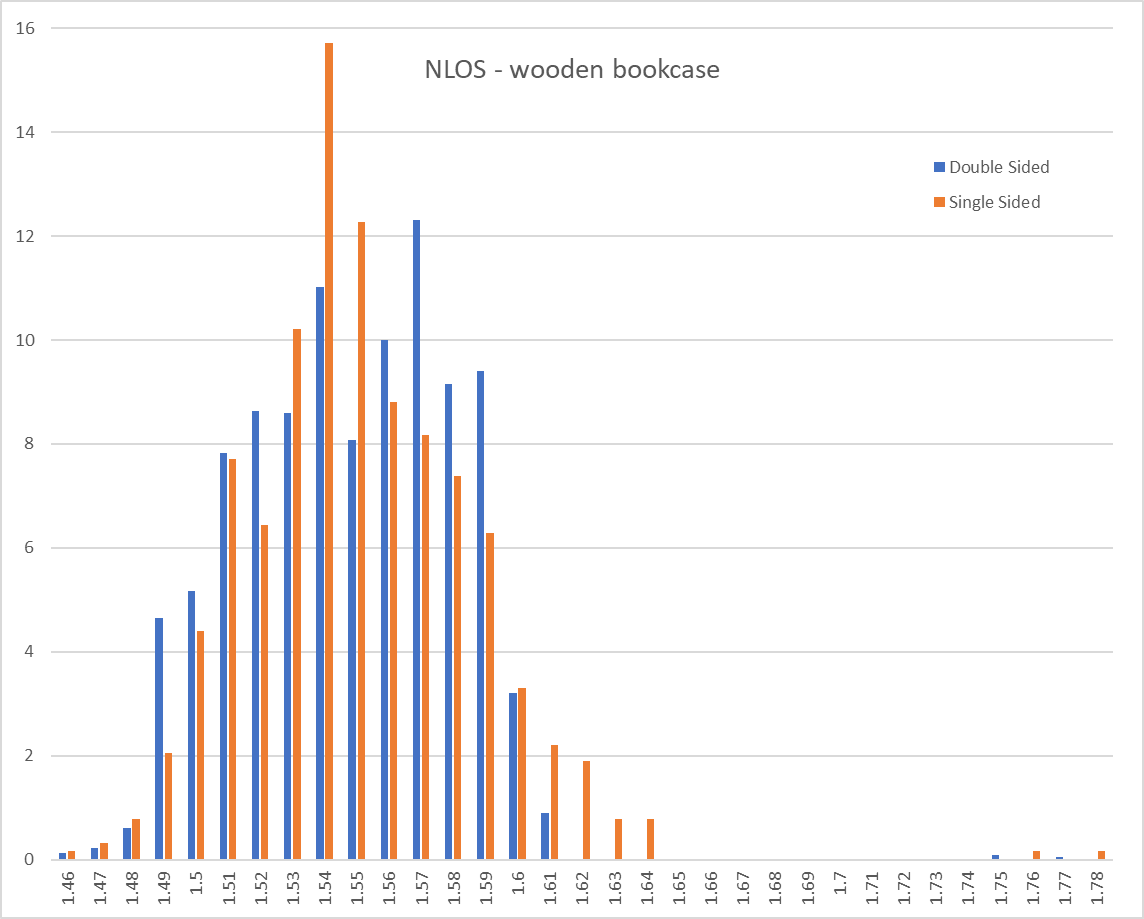
The average SS range was 3 mm different from the average DS range (1.3405 m Vs 1.3433 m). The single sided range standard deviation was 2 cm as opposed to 1.5 cm for double sided.
So no meaningful change in average accuracy. A slight increase in measurement noise but not enough to bother most people.
I must say I was rather surprised that the single sided system worked quite that well.