Hello everyone,
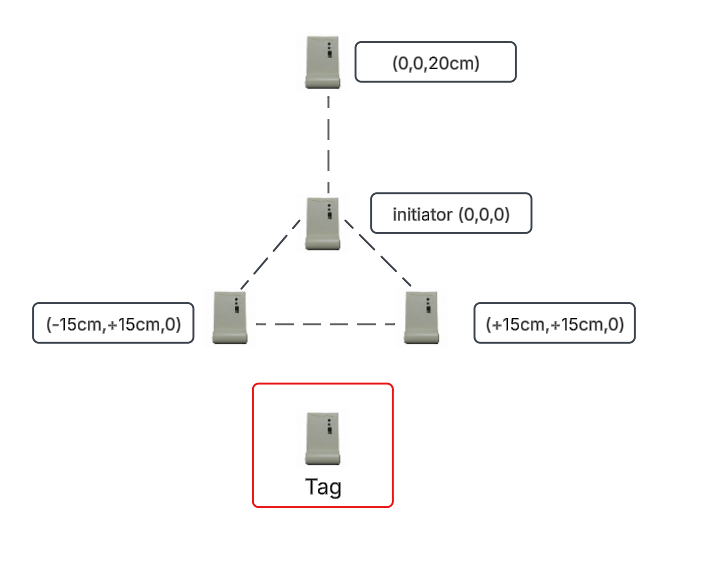
I am working on a project using the Decawave MDEK1001 UWB system for positioning. My setup consists of three anchors and one tag, as shown in the attached diagram. The tag moves in all axes during testing.
I am experiencing two major issues:
- Signal loss when the tag is close to the anchors:
- When the tag is near the anchors (within ~10-20 cm), I get a lot of missing data (
NaNvalues) in my CSV logs. - The signal seems to cut off frequently, making tracking unreliable.
- Poor accuracy when the tag is farther away (~60 cm or more):
- When I increase the distance between the tag and anchors (~60 cm or more), the system works but with poor accuracy.
- The estimated positions fluctuate significantly compared to the actual position.
I would like to understand:
- Why is there significant signal loss when the tag is near the anchors?
- Why is the accuracy poor when the tag moves farther away?
- What are the best practices or solutions to improve both reliability and precision?
Thanks in advance