Im currently trying to implemente an UWB SS TWR comunication to calculate treelaterate my position in indoor ambients and the sensibility of the sistem due angle variations is interfering with re accuracy of the data collected. I think that my problem (high error due angle variation) is because the non-uniformity of the DWM3000 antena’s diagram of irradiation (as seen in the DWM3000 datasheet), causing the signal attenuation to vary depending on the angle between the anchor and the UWB tag. And as APS011 states, there is an error proportional to the incoming power.
Firstly I thought it was possible to correct these errors via software, I thought that if I created my own table with the arrival power values and the correction values it would be possible to correct them.
To validate this hypothesis, an experiment was conducted in which two devices—the anchor and tag—were positioned two meters above the ground and with the same initial orientation. I placed them at a height to avoid multipath.
Data collection began, and the tag was continuously rotated, attempting to cover as many angles as possible and, consequently, attenuation from the radiation pattern. The distance and rx power were measured at the tag, and knowing the actual distance between the devices—approximately six feet—the measurement error in relation to the incoming power was calculated.
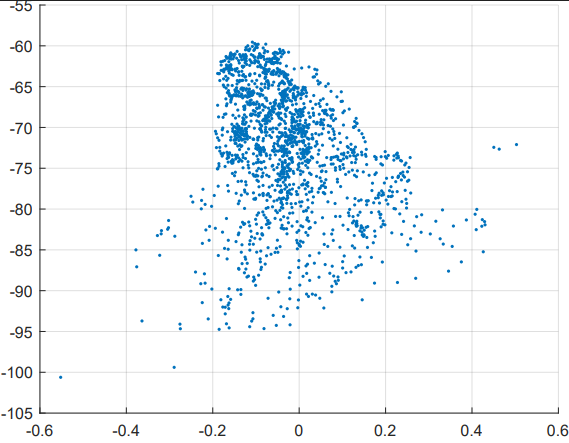
The X axis is the error in meters and the Y axis is de power attenuation in dBm.
Well, with this result, the only thing that came to my mind was that I have to change the antenna. Does anyone know of a way to get around this problem and make the UWB measurement more stable to angle variations?