Hi I am using two examples as double sided initiator and responder with interrupts but getting very high reading of distance.
This is my initiator side code
extern void test_run_info(unsigned char *data);
/* Default communication configuration. We use default non-STS DW mode. */
static dwt_config_t config = {
9,
DWT_PLEN_128,
DWT_PAC8,
9,
9,
1,
DWT_BR_6M8,
DWT_PHRMODE_STD,
DWT_PHRRATE_STD,
(129 + 8 - 8),
DWT_STS_MODE_OFF,
DWT_STS_LEN_64,
DWT_PDOA_M0
};
/* Inter-ranging delay period, in milliseconds. */
#define RNG_DELAY_MS 1000
/* Default antenna delay values for 64 MHz PRF. See NOTE 1 below. */
#define TX_ANT_DLY 16385
#define RX_ANT_DLY 16385
/* Frames used in the ranging process. See NOTE 2 below. */
static uint8_t tx_poll_msg[] = { 0x41, 0x88, 0, 0xCA, 0xDE, 'W', 'A', 'V', 'E', 0x21 };
static uint8_t rx_resp_msg[] = { 0x41, 0x88, 0, 0xCA, 0xDE, 'V', 'E', 'W', 'A', 0x10, 0x02, 0, 0 };
static uint8_t tx_final_msg[] = { 0x41, 0x88, 0, 0xCA, 0xDE, 'W', 'A', 'V', 'E', 0x23, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0 };
/* Length of the common part of the message (up to and including the function code, see NOTE 2 below). */
#define ALL_MSG_COMMON_LEN 10
/* Indexes to access some of the fields in the frames defined above. */
#define ALL_MSG_SN_IDX 2
#define FINAL_MSG_POLL_TX_TS_IDX 10
#define FINAL_MSG_RESP_RX_TS_IDX 14
#define FINAL_MSG_FINAL_TX_TS_IDX 18
/* Frame sequence number, incremented after each transmission. */
static uint8_t frame_seq_nb = 0;
/* Declaration of static functions. */
static void rx_ok_cb(const dwt_cb_data_t *cb_data);
static void rx_to_cb(const dwt_cb_data_t *cb_data);
static void rx_err_cb(const dwt_cb_data_t *cb_data);
static void tx_conf_cb(const dwt_cb_data_t *cb_data);
static void create_timers();
//variables for application timer
uint32_t msTicks = 0;
uint32_t returnCode = 0;
ret_code_t err_code;
APP_TIMER_DEF(m_repeated_timer_id); /**< Handler for repeated timer. */
//User leds
#define gpio_led_10 5
#define gpio_led_11 22
//Event for dw3000 communication
#define timeout_event 1
#define reciever_event 2
#define transmit_event 3
#define error_event 4
#define led_control 5
uint8_t states = 10;
uint8_t ex_flag;
/* Hold copy of status register state here for reference so that it can be examined at a debug breakpoint. */
static uint32_t status_reg = 0;
#define POLL_TX_TO_RESP_RX_DLY_UUS (300 + CPU_PROCESSING_TIME)
#define RESP_RX_TO_FINAL_TX_DLY_UUS (300 + CPU_PROCESSING_TIME)
#define RESP_RX_TIMEOUT_UUS 300
#define PRE_TIMEOUT 5
#define TX_TO_RX_DELAY_UUS 60
#define RX_RESP_TO_UUS 5000
/* Default inter-frame delay period, in milliseconds. */
#define DFLT_TX_DELAY_MS 1000
/* Inter-frame delay period in case of RX timeout, in milliseconds.
* In case of RX timeout, assume the receiver is not present and lower the rate of blink transmission. */
#define RX_TO_TX_DELAY_MS 3000
/* Inter-frame delay period in case of RX error, in milliseconds.
* In case of RX error, assume the receiver is present but its response has not been received for any reason and retry blink transmission immediately. */
#define RX_ERR_TX_DELAY_MS 0
/* Current inter-frame delay period.
* This global static variable is also used as the mechanism to signal events to the background main loop from the interrupt handler callbacks,
* which set it to positive delay values. */
static int32_t tx_delay_ms = -1;
/* Buffer to store received frame. See NOTE 5 below. */
static uint8_t rx_buffer[FRAME_LEN_MAX];
/* Time-stamps of frames transmission/reception, expressed in device time units. */
static uint64_t poll_tx_ts;
static uint64_t resp_rx_ts;
static uint64_t final_tx_ts;
/* Values for the PG_DELAY and TX_POWER registers reflect the bandwidth and power of the spectrum at the current
* temperature. These values can be calibrated prior to taking reference measurements. See NOTE 8 below. */
extern dwt_txconfig_t txconfig_options;
/*! ------------------------------------------------------------------------------------------------------------------
* @fn dds_twr_initiator_interrupt()
*
* @brief Application entry point.
*
* @param none
*
* @return none
*/
int dds_twr_initiator_interrupt(void)
{
/* Display application name on LCD. */
test_run_info((unsigned char *)APP_NAME);
//Initialize application timer
app_timer_init();
//Create Timer instance
create_timers();
// Configure LED 10 --> P0.05 and LED 11 --> P0.22 as outputs
nrf_gpio_cfg_output(gpio_led_10);
nrf_gpio_cfg_output(gpio_led_11);
/* Configure SPI rate, DW3000 supports up to 36 MHz */
port_set_dw_ic_spi_fastrate();
/* Reset DW IC */
reset_DWIC(); /* Target specific drive of RSTn line into DW IC low for a period. */
Sleep(2); // Time needed for DW3000 to start up (transition from INIT_RC to IDLE_RC
/* Probe for the correct device driver. */
dwt_probe((struct dwt_probe_s *)&dw3000_probe_interf);
while (!dwt_checkidlerc()) /* Need to make sure DW IC is in IDLE_RC before proceeding */ { };
if (dwt_initialise(DWT_DW_INIT) == DWT_ERROR)
{
test_run_info((unsigned char *)"INIT FAILED ");
while (1) { };
}
/* Configure DW IC. See NOTE 2 below. */
/* if the dwt_configure returns DWT_ERROR either the PLL or RX calibration has failed the host should reset the device */
if (dwt_configure(&config))
{
test_run_info((unsigned char *)"CONFIG FAILED ");
while (1) { };
}
/* Configure the TX spectrum parameters (power, PG delay and PG count) */
dwt_configuretxrf(&txconfig_options);
/* Register the call-backs (SPI CRC error callback is not used). */
dwt_setcallbacks(&tx_conf_cb, &rx_ok_cb, NULL, &rx_err_cb, NULL, NULL, NULL);
//| DWT_INT_RXFTO_BIT_MASK
/* Enable wanted interrupts (TX confirmation, RX good frames, RX timeouts and RX errors). */
dwt_setinterrupt(DWT_INT_TXFRS_BIT_MASK | DWT_INT_RXFCG_BIT_MASK | DWT_INT_RXPTO_BIT_MASK | DWT_INT_RXPHE_BIT_MASK
| DWT_INT_RXFCE_BIT_MASK | DWT_INT_RXFSL_BIT_MASK | DWT_INT_RXSTO_BIT_MASK,
0, DWT_ENABLE_INT);
/*Clearing the SPI ready interrupt*/
dwt_writesysstatuslo(DWT_INT_RCINIT_BIT_MASK | DWT_INT_SPIRDY_BIT_MASK);
/* Install DW IC IRQ handler. */
port_set_dwic_isr(dwt_isr);
//dwt_setpreambledetecttimeout(PRE_TIMEOUT);
/* Apply default antenna delay value. See NOTE 1 below. */
dwt_setrxantennadelay(RX_ANT_DLY);
dwt_settxantennadelay(TX_ANT_DLY);
/* Next can enable TX/RX states output on GPIOs 5 and 6 to help debug, and also TX/RX LEDs
* Note, in real low power applications the LEDs should not be used. */
dwt_setlnapamode(DWT_LNA_ENABLE | DWT_PA_ENABLE);
ex_flag = 0;
/* Loop forever initiating ranging exchanges. */
while (1)
{
if(!ex_flag)
{
dwt_setpreambledetecttimeout(0);
/* Write frame data to DW IC and prepare transmission. See NOTE 9 below. */
tx_poll_msg[ALL_MSG_SN_IDX] = frame_seq_nb;
dwt_writetxdata(sizeof(tx_poll_msg), tx_poll_msg, 0); /* Zero offset in TX buffer. */
dwt_writetxfctrl(sizeof(tx_poll_msg) + FCS_LEN, 0, 1); /* Zero offset in TX buffer, ranging. */
/* Start transmission, indicating that a response is expected so that reception is enabled automatically after the frame is sent and the delay
* set by dwt_setrxaftertxdelay() has elapsed. */
dwt_starttx(DWT_START_TX_IMMEDIATE | DWT_RESPONSE_EXPECTED);
//reset ticks value and start the timer
msTicks = 0;
err_code = app_timer_start(m_repeated_timer_id, APP_TIMER_TICKS(1), NULL);
APP_ERROR_CHECK(err_code);
ex_flag = 1;
}
switch(states)
{
case timeout_event :
//Re-enable Reciever
if(ex_flag == 1)
{
//reset ticks value and stop the timer
msTicks = 0;
err_code = app_timer_stop(m_repeated_timer_id);
APP_ERROR_CHECK(err_code);
__disable_irq();
dwt_setpreambledetecttimeout(0);
/* Write frame data to DW IC and prepare transmission */
tx_poll_msg[ALL_MSG_SN_IDX] = frame_seq_nb;
dwt_writetxdata(sizeof(tx_poll_msg), tx_poll_msg, 0); /* Zero offset in TX buffer. */
dwt_writetxfctrl(sizeof(tx_poll_msg) + FCS_LEN, 0, 1); /* Zero offset in TX buffer, ranging. */
/* Start transmission, indicating that a response is expected so that reception is enabled automatically after the frame is sent and the delay
* set by dwt_setrxaftertxdelay() has elapsed. */
dwt_starttx(DWT_START_TX_IMMEDIATE | DWT_RESPONSE_EXPECTED);
__enable_irq();
//reset ticks value and start the timer
msTicks = 0;
err_code = app_timer_start(m_repeated_timer_id, APP_TIMER_TICKS(1), NULL);
APP_ERROR_CHECK(err_code);
ex_flag = 1;
}
states = 10;
break;
case reciever_event :
/* Check that the frame is recieved from "DS TWR initiator with interrupt side".
* As the sequence number field of the frame is not relevant, it is cleared to simplify the validation of the frame. */
rx_buffer[ALL_MSG_SN_IDX] = 0;
if (memcmp(rx_buffer, rx_resp_msg, ALL_MSG_COMMON_LEN) == 0)
{
uint32_t final_tx_time;
int ret;
/* Retrieve poll transmission and response reception timestamp. */
poll_tx_ts = get_tx_timestamp_u64();
resp_rx_ts = get_rx_timestamp_u64();
//reset ticks value and stop the timer
ex_flag = 0;
msTicks = 0;
err_code = app_timer_stop(m_repeated_timer_id);
APP_ERROR_CHECK(err_code);
/* Compute final message transmission time. See NOTE 11 below. */
final_tx_time = (resp_rx_ts + (RESP_RX_TO_FINAL_TX_DLY_UUS * UUS_TO_DWT_TIME)) >> 8;
dwt_setdelayedtrxtime(final_tx_time);
/* Final TX timestamp is the transmission time we programmed plus the TX antenna delay. */
final_tx_ts = (((uint64_t)(final_tx_time & 0xFFFFFFFEUL)) << 8) + TX_ANT_DLY;
/* Write all timestamps in the final message. See NOTE 12 below. */
final_msg_set_ts(&tx_final_msg[FINAL_MSG_POLL_TX_TS_IDX], poll_tx_ts);
final_msg_set_ts(&tx_final_msg[FINAL_MSG_RESP_RX_TS_IDX], resp_rx_ts);
final_msg_set_ts(&tx_final_msg[FINAL_MSG_FINAL_TX_TS_IDX], final_tx_ts);
/* Write and send final message. See NOTE 9 below. */
tx_final_msg[ALL_MSG_SN_IDX] = frame_seq_nb;
dwt_writetxdata(sizeof(tx_final_msg), tx_final_msg, 0); /* Zero offset in TX buffer. */
dwt_writetxfctrl(sizeof(tx_final_msg) + FCS_LEN, 0, 1); /* Zero offset in TX buffer, ranging bit set. */
ret = dwt_starttx(DWT_START_TX_IMMEDIATE);
/* If dwt_starttx() returns an error, abandon this ranging exchange and proceed to the next one. See NOTE 13 below. */
if (ret == DWT_SUCCESS)
{
/* Clear TXFRS event. */
//dwt_writesysstatuslo(DWT_INT_TXFRS_BIT_MASK);
/* Increment frame sequence number after transmission of the final message (modulo 256). */
frame_seq_nb++;
}
}
states = 10;
break;
case transmit_event :
break;
case error_event :
/* Clear RX error/timeout events in the DW IC status register. */
dwt_writesysstatuslo(SYS_STATUS_ALL_RX_TO | SYS_STATUS_ALL_RX_ERR);
ex_flag = 0;
states = 10;
break;
default :
break;
}
/* Execute a delay between ranging exchanges. */
if(!ex_flag) Sleep(RNG_DELAY_MS);
}
}
/*! ------------------------------------------------------------------------------------------------------------------
* @fn rx_ok_cb()
*
* @brief Callback to process RX good frame events
*
* @param cb_data callback data
*
* @return none
*/
static void rx_ok_cb(const dwt_cb_data_t *cb_data)
{
int i;
/* Clear local RX buffer to avoid having leftovers from previous receptions. This is not necessary but is included here to aid reading the RX
* buffer. */
for (i = 0; i < FRAME_LEN_MAX; i++)
{
rx_buffer[i] = 0;
}
/* A frame has been received, copy it to our local buffer. */
if (cb_data->datalength <= FRAME_LEN_MAX)
{
dwt_readrxdata(rx_buffer, cb_data->datalength, 0);
}
states = 2;
}
/*! ------------------------------------------------------------------------------------------------------------------
* @fn rx_err_cb()
*
* @brief Callback to process RX error events
*
* @param cb_data callback data
*
* @return none
*/
static void rx_err_cb(const dwt_cb_data_t *cb_data)
{
(void)cb_data;
/* TESTING BREAKPOINT LOCATION #3 */
}
/**@brief Timeout handler for the repeated timer.
*/
static void repeated_timer_handler(void * p_context)
{
//Time out condition
if(++msTicks == 5000)
{
nrf_gpio_pin_toggle(gpio_led_10);
states = 1;
msTicks = 0;
}
}
/**@brief Create timers.
*/
static void create_timers()
{
// Create timers
err_code = app_timer_create(&m_repeated_timer_id,
APP_TIMER_MODE_REPEATED,
repeated_timer_handler);
APP_ERROR_CHECK(err_code);
}
And this this responder side code
extern void test_run_info(unsigned char *data);
/* Example application name */
#define APP_NAME "DS TWR RESP v1.0"
/* Default communication configuration. We use default non-STS DW mode. */
static dwt_config_t config = {
9, /* Channel number. */
DWT_PLEN_128, /* Preamble length. Used in TX only. */
DWT_PAC8, /* Preamble acquisition chunk size. Used in RX only. */
9, /* TX preamble code. Used in TX only. */
9, /* RX preamble code. Used in RX only. */
1, /* 0 to use standard 8 symbol SFD, 1 to use non-standard 8 symbol, 2 for non-standard 16 symbol SFD and 3 for 4z 8 symbol SDF type */
DWT_BR_6M8, /* Data rate. */
DWT_PHRMODE_STD, /* PHY header mode. */
DWT_PHRRATE_STD, /* PHY header rate. */
(129 + 8 - 8), /* SFD timeout (preamble length + 1 + SFD length - PAC size). Used in RX only. */
DWT_STS_MODE_OFF, /* STS disabled */
DWT_STS_LEN_64, /* STS length see allowed values in Enum dwt_sts_lengths_e */
DWT_PDOA_M0 /* PDOA mode off */
};
/* Inter-ranging delay period, in milliseconds. */
#define RNG_DELAY_MS 1000
/* Default antenna delay values for 64 MHz PRF. See NOTE 1 below. */
#define TX_ANT_DLY 16385
#define RX_ANT_DLY 16385
/* Frames used in the ranging process. See NOTE 2 below. */
static uint8_t rx_poll_msg[] = { 0x41, 0x88, 0, 0xCA, 0xDE, 'W', 'A', 'V', 'E', 0x21, 0, 0 };
static uint8_t tx_resp_msg[] = { 0x41, 0x88, 0, 0xCA, 0xDE, 'V', 'E', 'W', 'A', 0x10, 0x02, 0, 0, 0, 0 };
static uint8_t rx_final_msg[] = { 0x41, 0x88, 0, 0xCA, 0xDE, 'W', 'A', 'V', 'E', 0x23, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0 };
/* Length of the common part of the message (up to and including the function code, see NOTE 2 below). */
#define ALL_MSG_COMMON_LEN 10
/* Index to access some of the fields in the frames involved in the process. */
#define ALL_MSG_SN_IDX 2
#define FINAL_MSG_POLL_TX_TS_IDX 10
#define FINAL_MSG_RESP_RX_TS_IDX 14
#define FINAL_MSG_FINAL_TX_TS_IDX 18
/* Frame sequence number, incremented after each transmission. */
static uint8_t frame_seq_nb = 0;
/* Declaration of static functions. */
static void rx_ok_cb(const dwt_cb_data_t *cb_data);
static void rx_to_cb(const dwt_cb_data_t *cb_data);
static void rx_err_cb(const dwt_cb_data_t *cb_data);
static void tx_conf_cb(const dwt_cb_data_t *cb_data);
static void create_timers();
//variables for application timer
uint32_t msTicks = 0;
uint32_t returnCode = 0;
ret_code_t err_code;
APP_TIMER_DEF(m_repeated_timer_id); /**< Handler for repeated timer. */
//User leds
#define gpio_led_10 5
#define gpio_led_11 22
//Event for dw3000 communication
#define timeout_event 1
#define reciever_event 2
#define transmit_event 3
#define error_event 4
#define led_control 5
uint8_t states = 10;
uint8_t ex_flag;
uint8_t tx_flag = 0;
/* Hold copy of status register state here for reference so that it can be examined at a debug breakpoint. */
static uint32_t status_reg = 0;
/* Delay between frames, in UWB microseconds. See NOTE 4 below. */
/* This is the delay from Frame RX timestamp to TX reply timestamp used for calculating/setting the DW IC's delayed TX function. This includes the
* frame length of approximately 190 us with above configuration. */
#define POLL_RX_TO_RESP_TX_DLY_UUS 900
/* This is the delay from the end of the frame transmission to the enable of the receiver, as programmed for the DW IC's wait for response feature. */
#define RESP_TX_TO_FINAL_RX_DLY_UUS 500
/* Receive final timeout. See NOTE 5 below. */
#define FINAL_RX_TIMEOUT_UUS 220
/* Preamble timeout, in multiple of PAC size. See NOTE 6 below. */
#define PRE_TIMEOUT 5
/* Delay from end of transmission to activation of reception, expressed in UWB microseconds (1 uus is 512/499.2 microseconds). See NOTE 3 below. */
#define TX_TO_RX_DELAY_UUS 60
/* Receive response timeout, expressed in UWB microseconds. See NOTE 4 below. */
#define RX_RESP_TO_UUS 5000
/* Default inter-frame delay period, in milliseconds. */
#define DFLT_TX_DELAY_MS 1000
/* Inter-frame delay period in case of RX timeout, in milliseconds.
* In case of RX timeout, assume the receiver is not present and lower the rate of blink transmission. */
#define RX_TO_TX_DELAY_MS 3000
/* Buffer to store received frame. See NOTE 5 below. */
static uint8_t rx_buffer[FRAME_LEN_MAX];
/* Timestamps of frames transmission/reception. */
static uint64_t poll_rx_ts;
static uint64_t resp_tx_ts;
static uint64_t final_rx_ts;
static double tof;
static double distance;
extern dwt_txconfig_t txconfig_options;
/*! ------------------------------------------------------------------------------------------------------------------
* @fn ds_twr_responder_interrupt()
*
* @brief Application entry point.
*
* @param none
*
* @return none
*/
int ds_twr_responder_interrupt(void)
{
/* Display application name on LCD. */
test_run_info((unsigned char *)APP_NAME);
//Initialize application timer
app_timer_init();
//Create Timer instance
create_timers();
// Configure LED 10 --> P0.05 and LED 11 --> P0.22 as outputs
nrf_gpio_cfg_output(gpio_led_10);
nrf_gpio_cfg_output(gpio_led_11);
/* Configure SPI rate, DW3000 supports up to 36 MHz */
port_set_dw_ic_spi_fastrate();
/* Reset DW IC */
reset_DWIC(); /* Target specific drive of RSTn line into DW IC low for a period. */
Sleep(2); // Time needed for DW3000 to start up (transition from INIT_RC to IDLE_RC
/* Probe for the correct device driver. */
dwt_probe((struct dwt_probe_s *)&dw3000_probe_interf);
while (!dwt_checkidlerc()) /* Need to make sure DW IC is in IDLE_RC before proceeding */ { };
if (dwt_initialise(DWT_DW_INIT) == DWT_ERROR)
{
test_run_info((unsigned char *)"INIT FAILED ");
while (1) { };
}
/* Configure DW IC. See NOTE 15 below. */
/* if the dwt_configure returns DWT_ERROR either the PLL or RX calibration has failed the host should reset the device */
if (dwt_configure(&config))
{
test_run_info((unsigned char *)"CONFIG FAILED ");
while (1) { };
}
/* Configure the TX spectrum parameters (power, PG delay and PG count) */
dwt_configuretxrf(&txconfig_options);
/* Register the call-backs (SPI CRC error callback is not used). */
dwt_setcallbacks(&tx_conf_cb, &rx_ok_cb, NULL, &rx_err_cb, NULL, NULL, NULL);
// | DWT_INT_RXFTO_BIT_MASK
/* Enable wanted interrupts (TX confirmation, RX good frames, RX timeouts and RX errors). */
dwt_setinterrupt(DWT_INT_TXFRS_BIT_MASK | DWT_INT_RXFCG_BIT_MASK| DWT_INT_RXPTO_BIT_MASK | DWT_INT_RXPHE_BIT_MASK
| DWT_INT_RXFCE_BIT_MASK | DWT_INT_RXFSL_BIT_MASK | DWT_INT_RXSTO_BIT_MASK,
0, DWT_ENABLE_INT);
/*Clearing the SPI ready interrupt*/
dwt_writesysstatuslo(DWT_INT_RCINIT_BIT_MASK | DWT_INT_SPIRDY_BIT_MASK);
/* Install DW IC IRQ handler. */
port_set_dwic_isr(dwt_isr);
/* Apply default antenna delay value. See NOTE 1 below. */
dwt_setrxantennadelay(RX_ANT_DLY);
dwt_settxantennadelay(TX_ANT_DLY);
/* Next can enable TX/RX states output on GPIOs 5 and 6 to help debug, and also TX/RX LEDs
* Note, in real low power applications the LEDs should not be used. */
dwt_setlnapamode(DWT_LNA_ENABLE | DWT_PA_ENABLE);
ex_flag = 0;
/* Loop forever responding to ranging requests. */
while (1)
{
if(!ex_flag)
{
dwt_setpreambledetecttimeout(0);
/* Activate reception immediately. */
dwt_rxenable(DWT_START_RX_IMMEDIATE);
//reset ticks value and start the timer
msTicks = 0;
err_code = app_timer_start(m_repeated_timer_id, APP_TIMER_TICKS(1), NULL);
APP_ERROR_CHECK(err_code);
ex_flag = 3;
}
switch(states)
{
case timeout_event :
//Re-enable Reciever
if(ex_flag == 0)
{
dwt_setpreambledetecttimeout(0);
dwt_rxenable(DWT_START_RX_IMMEDIATE);
}
else if(ex_flag == 3)
{
//reset ticks value and stop the timer
msTicks = 0;
err_code = app_timer_stop(m_repeated_timer_id);
APP_ERROR_CHECK(err_code);
__disable_irq();
dwt_setpreambledetecttimeout(0);
dwt_rxenable(DWT_START_RX_IMMEDIATE);
__enable_irq();
//reset ticks value and start the timer
msTicks = 0;
err_code = app_timer_start(m_repeated_timer_id, APP_TIMER_TICKS(1), NULL);
APP_ERROR_CHECK(err_code);
ex_flag = 3;
}
states = 10;
break;
case reciever_event :
/* Check that the frame is recieved from "DS TWR initiator with interrupt side".
* As the sequence number field of the frame is not relevant, it is cleared to simplify the validation of the frame. */
rx_buffer[ALL_MSG_SN_IDX] = 0;
if (memcmp(rx_buffer, rx_poll_msg, ALL_MSG_COMMON_LEN) == 0)
{
uint32_t resp_tx_time;
int ret;
/* Retrieve poll reception timestamp. */
poll_rx_ts = get_rx_timestamp_u64();
//reset ticks value and stop the timer
msTicks = 0;
err_code = app_timer_stop(m_repeated_timer_id);
APP_ERROR_CHECK(err_code);
/* Set send time for response. See NOTE 9 below. */
resp_tx_time = (poll_rx_ts + (POLL_RX_TO_RESP_TX_DLY_UUS * UUS_TO_DWT_TIME)) >> 8;
dwt_setdelayedtrxtime(resp_tx_time);
/* Set expected delay and timeout for final message reception. See NOTE 4 and 5 below. */
dwt_setrxaftertxdelay(RESP_TX_TO_FINAL_RX_DLY_UUS);
//dwt_setrxtimeout(FINAL_RX_TIMEOUT_UUS);
/* Set preamble timeout for expected frames. See NOTE 6 below. */
dwt_setpreambledetecttimeout(PRE_TIMEOUT);
/* Write and send the response message. See NOTE 10 below.*/
tx_resp_msg[ALL_MSG_SN_IDX] = frame_seq_nb;
dwt_writetxdata(sizeof(tx_resp_msg), tx_resp_msg, 0); /* Zero offset in TX buffer. */
dwt_writetxfctrl(sizeof(tx_resp_msg), 0, 1); /* Zero offset in TX buffer, ranging. */
tx_flag = 0;
ret = dwt_starttx(DWT_START_TX_IMMEDIATE | DWT_RESPONSE_EXPECTED);
if (ret == DWT_SUCCESS)
{
/* Clear TXFRS event. */
// dwt_writesysstatuslo(DWT_INT_TXFRS_BIT_MASK);
}
//reset ticks value and start the timer
msTicks = 0;
err_code = app_timer_start(m_repeated_timer_id, APP_TIMER_TICKS(1), NULL);
APP_ERROR_CHECK(err_code);
ex_flag = 3;
}
else if(memcmp(rx_buffer, rx_final_msg, ALL_MSG_COMMON_LEN) == 0)
{
uint32_t poll_tx_ts, resp_rx_ts, final_tx_ts;
uint32_t poll_rx_ts_32, resp_tx_ts_32, final_rx_ts_32;
double Ra, Rb, Da, Db;
int64_t tof_dtu;
/* Retrieve response transmission and final reception timestamps. */
resp_tx_ts = get_tx_timestamp_u64();
final_rx_ts = get_rx_timestamp_u64();
//reset ticks value and stop the timer
msTicks = 0;
err_code = app_timer_stop(m_repeated_timer_id);
APP_ERROR_CHECK(err_code);
/* Get timestamps embedded in the final message. */
final_msg_get_ts(&rx_buffer[FINAL_MSG_POLL_TX_TS_IDX], &poll_tx_ts);
final_msg_get_ts(&rx_buffer[FINAL_MSG_RESP_RX_TS_IDX], &resp_rx_ts);
final_msg_get_ts(&rx_buffer[FINAL_MSG_FINAL_TX_TS_IDX], &final_tx_ts);
/* Compute time of flight. 32-bit subtractions give correct answers even if clock has wrapped. See NOTE 12 below. */
poll_rx_ts_32 = (uint32_t)poll_rx_ts;
resp_tx_ts_32 = (uint32_t)resp_tx_ts;
final_rx_ts_32 = (uint32_t)final_rx_ts;
Ra = (double)(resp_rx_ts - poll_tx_ts);
Rb = (double)(final_rx_ts_32 - resp_tx_ts_32);
Da = (double)(final_tx_ts - resp_rx_ts);
Db = (double)(resp_tx_ts_32 - poll_rx_ts_32);
tof_dtu = (int64_t)((Ra * Rb - Da * Db) / (Ra + Rb + Da + Db));
tof = tof_dtu * DWT_TIME_UNITS;
distance = tof * SPEED_OF_LIGHT;
/* Display computed distance on LCD. */
sprintf(dist_str, "DIST: %3.2f m", distance);
test_run_info((unsigned char *)dist_str);
ex_flag =0;
}
states = 10;
break;
case transmit_event :
break;
case error_event :
/* Clear RX error/timeout events in the DW IC status register. */
dwt_writesysstatuslo(SYS_STATUS_ALL_RX_TO | SYS_STATUS_ALL_RX_ERR);
if(ex_flag == 3)
{
dwt_setpreambledetecttimeout(0);
/* Activate reception immediately. */
dwt_rxenable(DWT_START_RX_IMMEDIATE);
}
states = 10;
break;
default :
break;
}
}
return 0;
}
/*! ------------------------------------------------------------------------------------------------------------------
* @fn rx_ok_cb()
*
* @brief Callback to process RX good frame events
*
* @param cb_data callback data
*
* @return none
*/
static void rx_ok_cb(const dwt_cb_data_t *cb_data)
{
int i;
/* Clear local RX buffer to avoid having leftovers from previous receptions. This is not necessary but is included here to aid reading the RX
* buffer. */
for (i = 0; i < FRAME_LEN_MAX; i++)
{
rx_buffer[i] = 0;
}
/* A frame has been received, copy it to our local buffer. */
if (cb_data->datalength <= FRAME_LEN_MAX)
{
dwt_readrxdata(rx_buffer, cb_data->datalength, 0);
states = 2;
}
/* Set corresponding inter-frame delay. */
//tx_delay_ms = DFLT_TX_DELAY_MS;
/* TESTING BREAKPOINT LOCATION #1 */
}
/*! ------------------------------------------------------------------------------------------------------------------
* @fn rx_err_cb()
*
* @brief Callback to process RX error events
*
* @param cb_data callback data
*
* @return none
*/
static void rx_err_cb(const dwt_cb_data_t *cb_data)
{
(void)cb_data;
/* Set corresponding inter-frame delay. */
//tx_delay_ms = RX_ERR_TX_DELAY_MS;
states = 4;
/* TESTING BREAKPOINT LOCATION #3 */
}
/**@brief Timeout handler for the repeated timer.
*/
static void repeated_timer_handler(void * p_context)
{
//Time out condition
if(++msTicks == 5000)
{
nrf_gpio_pin_toggle(gpio_led_10);
states = 1;
msTicks = 0;
}
}
/**@brief Create timers.
*/
static void create_timers()
{
// Create timers
err_code = app_timer_create(&m_repeated_timer_id,
APP_TIMER_MODE_REPEATED,
repeated_timer_handler);
APP_ERROR_CHECK(err_code);
}
I am getting distance value as
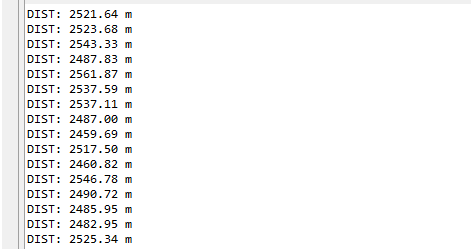
I am getting correct distance reading when using example codes.
Best Regards: Danish Riaz