I’m using the MDEK1001 system and would like to understand some points:
Regarding the anchors, does the distance between them affect signal performance? The datasheet specifies 28 meters, but I’m unable to achieve this distance in my system.
Do anchors in the same setup need to be at the same height from the ground? For example, do all three anchors in the front need to be at the same height, or does it not matter?
In the case of NLOS (Non-Line-of-Sight), does the system still provide accurate results, or does it experience delays (decreased frequency)?
I’m using a listener. Does the listener need to be in direct contact with the tag, or can it be placed anywhere?
Does the height of the anchors from the ground affect performance? I have them positioned at 55 cm.
If you’re talking about signal strength, it decreases over distance. I’m not sure if PANS provides it, but you could try upping the preamble length or lower the datarate to achieve higher ranges.
How far away from 28 metres is your system performance? Is it far off?
The PANS library supports 3 dimensional locations, so yes, you could place them at different heights. If you want to measure locations in 3d space, you’d actually have to have at least one anchor on a different height/ Y-Axis to calculate it.
Regarding NLOS, it’s quite hard to say. NLOS basically just describes every state that is not LOS. It could be cardboard blocking the vision or a steel-reinforced concrete wall.
The biggest problem with NLOS is that you have a signal thats get dampened on it’s ideal path (Through whatever obstacle is creating the NLOS scenario). The device therefore has a “harder time” figuring out if and when a signal was received.
At the same time, you have so-called multipath-propagation. The receiver receives not only the original, but also reflected signals from other obstacles. These signals interfere with the original signal and either can further dampen it or increase signal strength.
Generally, you differentiate between accuracy and precision.
If a measurement is accurate, it means that the calculated coordinates match/are near the real coordinates. Precision means that your accuracy could be way off, but the calculated coordinates stay consistent if not moving.
If the calculated coordinates would move around by e.g. +/-20cm but would be on average at the correct coordinates, you’d have accuracy, but low precision.
In your case, you’d probably have less precision in your measurements. You could compensate for that with more anchors (to give the PANS library more points/ vectors to calculate with).
By saying “listener”, I suppose you’re referring to the gateways you can use in such a system? As far as I can tell by the “DWM1001 System Overview and Performance” paper, both anchors and tags have to be connected to these gateways. You could however use multiple Gateways to cover more area.
The further away from ground and any other hypothetically reflective object the better. Typically, you shouldn’t put the anchors any closer than 30cm towards the ground. 55cm seems fine to me, you could however put them further up to e.g. 1-1.5m to avoid signal reflections from ground.
With regard to 1) the PANS system doesn’t let you change any of the radio characteristics.
However the issues seemed to be more to do with using a smaller spacing than recommended, generally there no issues with shorter ranges. The normal geometry rules apply, you want them as spread out as possible.
Geometry also factors into the heights a lot. If you want accurate height then the higher you can get the anchors the better. If all anchors are the same height there is an ambiguity as to whether you’re above or below them, adding some variation in height is good for this reason.
Hi Fhilb, thank you for your response.
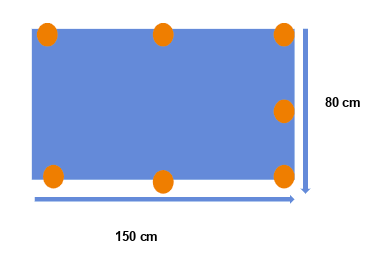
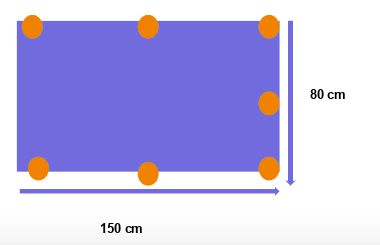
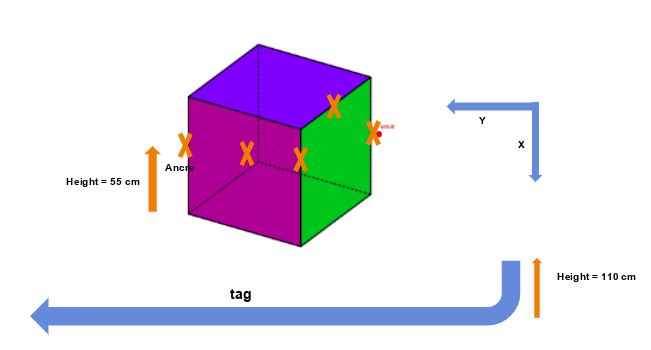
Regarding 1) yes, I’m using the PANS library. How can I increase the preamble length or lower the data rate to achieve higher ranges? Additionally, I have a question about the distance between the anchors (which are placed within the system, not the maximum distance). The datasheet recommends that the distance between two anchors should preferably be 28 meters, but in my system, the distance between the anchors is 50 to 90 cm, as shown in the image below.it can affect the performance of data.
4), no, I don’t have a gateway; I use simple anchors configured as listeners. Does the listener need to be in direct contact with the tag, or can it be placed anywhere?
Is it possible to retrieve the distance between the tag and each anchor every time? i need to know the distance between tag and each ancres(placed on the system)
So, I can place the anchors at different heights in each corner without affecting the geometric calculations. As you can see in the figure, in the front part where I placed 3 anchors close together, I positioned the middle anchor higher than the other two. However, for the 3 anchors on the right and left sides, I placed them all at nearly the same height.
thank you,
AsREB
OK, I’m confused, first you ask about how to achieve more range and then you show an area that 1.5m by 0.8m. Which is it? are you using a small area or a large one?
Either way, no changes to my answers:
You can’t change the PANS radio settings.
Using less than 28m separation shouldn’t be an issue.
You want variation in the antenna heights if you want good height data, straight lines (on any axis) will generally hurt the system performance.
I once created an application to create fake data for my system. You gave it anchor locations and a tag path and it generated ideal data with a set amount of noise added. I then ran that through my position calculation to see how increasing range noise would impact performance.
Generally performance was terrible, far worse than I was seeing in the real world even with less noise than the real world data showed.
I then changed it so the simulated anchors weren’t on a perfect grid and were in more realistic slightly wobbly lines. Simulated performance suddenly became far better and a lot closer to the real world.
I myself didn’t really work much with PANS. As Andy stated:
This regards to the preamble length and datarate as well, so you can’t change that in your system.
I’d suggest you try your system somewhere in open field to get an idea about the real range.
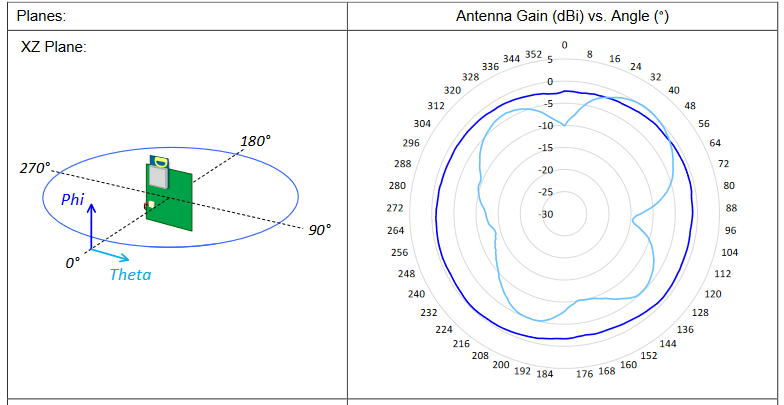
Also, I’d try to recheck how your antennas are orientated. The DWM1001C (which is the chip the DEV version is based on) has extremely stable characteristics in its X orientation (the darker blue-ish line):
Hi Fhilib and AndyA,
Thank you for your responses ,
I understand , but I want to verify some things with you.
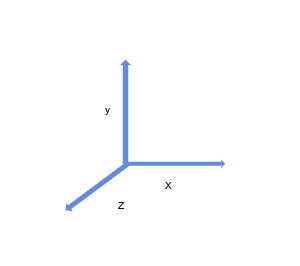
does the DWM1001 coordinate system (x, y) correspond to what is shown in the figure?
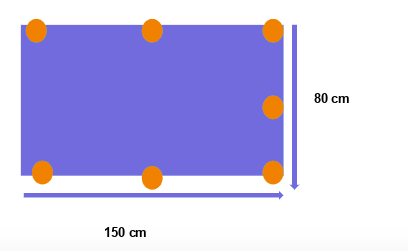
if I have a system with 5 anchors as shown in the figure below, and I placed them as illustrated, with the tag moving along the blue arrow, sometimes communicating with 3 anchors and sometimes with 4 anchors (it depends of its position) , can the tag determine its position when it communicates with only 3 anchors instead of 4 (note that the height of the tag is 110 cm as shown in the figure)?
Lastly, if the anchors’ antennas are at a height of 55 cm, is it best to place the tag at 55 cm, 110 cm, or what would be the most suitable height?
I hope you understand my question ,
Thank you .
You show a 3d image and then a 2d set of axis that doesn’t line up with the image.Since the image and the axis don’t line up with each other I have to say that no it doesn’t show how the decawave axis works because it doesn’t show anything meaningful.
Your tag movement pattern is significantly larger than your tag spacing image. Is this correct or simply things being drawn different scales? If so it should be pointed out that the tag should stay within the volume enclosed by the tags. As soon as the tag leaves that volume the accuracy will be terrible. This is a fundamental characteristic of the maths involved.
In theory only 3 anchors are required for a 3D solution. However any 3 anchors will by definition form a plane in 3d space and there will be an ambiguity as to whether the tag is above or below this plane. I don’t know how PANS will handle that, it may default to always below the plane since normally anchors are placed higher than the tags. 4 tags removes this ambiguity.
Hi ,
Thank you AndyA for your response,
I want to verify the orientation of the x, y and z of the system mdek1001 (z in down) , Is this correct? Additionally, when placing anchors relative to the ground, what is the minimum distance in centimeters that they should be placed above the ground?