Hi all,
We have performed some tests with DWM1001 DEV products in order to simulate our objective which is to develop a proximity system. We have some concerns regarding the scalability:
Is it possible that in a network there could be 2 initiators? If so, one will perform as an anchor and the other as an anchor-initiator? What is the maximum number of initiators in a network?
If we decide to install 3 anchors in a vehicle, and taking into account that the SEAT NUMBER is 30. Does it mean that only 10 vehicles in the near range of the first one mentioned will be detected? If another vehicle (11th) approaches the first, its anchors won’t be detected?
Regarding the CLOCK LEVEL, how will it work in a proximity system? Because not always a vehicle will be close to the other, so we don’t know if the value of the clock level maintains its value or it resets to zero after a while?
What is the limit of the number of devices that can be configured as anchors and initiators in a network?
Hey,
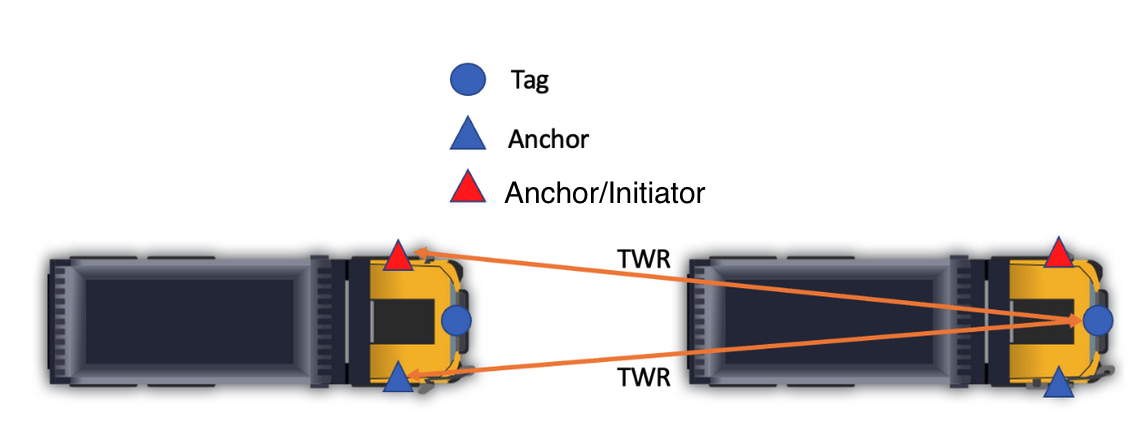
do I get correctly that you don’t want to have a static network of anchors in which you are measuring but a relative network, where anchors as well as tags are moving? And do you actually need the two distances between your tag to your Anchor and Anchor/Initiator? Or would you be okay with just the distance between two positions?
Regarding your questions:
As far as I am aware, there can only be one initiator active in your network at a time - with one exception: It would work, when no anchors that receive their packets from initiator 1 can “hear” initiator 2. But that would basically result in two networks (splitted by location).
That is correct
Yes, that is one big problem in your system. Qorvos API is approaching a static network infrastructure. You’d need something like a BLE communicator that roughly detects it’s nearby devices/ tags. After that, both devices do TWR.
I am not quite sure about that, I think a maximum of 8 anchors can be used. Be aware that the API just uses the best-working Anchors and a static position for it’s ranging.
Is it possible that in a network there could be 2 initiators? If so, one will perform as an anchor and the other as an anchor-initiator? What is the maximum number of initiators in a network?
Virtually any anchor can be also initiator (ANI), there is no limit about it. When ANI is powered on then it start sear for other network and if it find some (with the same PANID) then it will connect to the network as regular AN. There is another problem - when two (or more) ANI are power up and when they are not in range then each of them become ANI (this is OK) but when they come closer to each other it might take a long time (like minutes) to detect the other ANI and resynchronize with it.
If we decide to install 3 anchors in a vehicle, and taking into account that the SEAT NUMBER is 30. Does it mean that only 10 vehicles in the near range of the first one mentioned will be detected? If another vehicle (11th) approaches the first, its anchors won’t be detected?
Yes this is correct, the 11th vehicle won’t be detected as it cannot join the network.
Regarding the CLOCK LEVEL, how will it work in a proximity system? Because not always a vehicle will be close to the other, so we don’t know if the value of the clock level maintains its value or it resets to zero after a while?
I would not be worried about this. The maximum value is to high to cause any problems with vehicles. It always gets synchronized with the clock source - the ANI have always 0, then the first one gets 1 and so one - they are always linear ! So for having some issues you would need to have a super long corridor full of vehicles.
What is the limit of the number of devices that can be configured as anchors and initiators in a network?
Virtually unlimited - you can have 30anchor with range with each other, but that’s a quite uncommon. For a normal distributed network you can have +300 anchors. As noted above, each anchor can be also initiator but it will raise some issues.
In general in your scenario I would not recommend to install Anchor on truck it might lead to many issues. Just few that comes to my mind now:
Network synchronization can take a long time (the ANI needs to collide with other network first, it might take a long time).
You will never know which ANs will TN pickup for raging so you might never get the distance to the closest truck ! TN select AN based on it position (unknown in this scenario) and AN location (all will have zeros in this scenario) so it will pickup first 4 for ranging.
You should do a proper in RTLS installation with anchors on walls/poles and collect TN location via listeners/gateways and then report back the nearby trucks to phone/tablet/something.
Indeed, because the devices will be attached to the vehicle, they will be moving. It is ok if we get the distance between those two points (those vehicles), in that case there would be the anchor/initiator and the tag in the vehicle right?
I am considering to put an anchor/initiator since I want that each vehicle can detect another and no vehicle is undetected in a near range in order to alert and avoid collisions.
Since the configuration I was thinking seems to be not suitable for our purpose. I was wondering if the TDoA or AoA topology would work. If so, could you provide me some suggestions to accomplish the goal.
Hey,
regarding the terms tag and anchor: These terms are generally used in RTLS to describe nodes with different roles. Anchors play the static part in the system, meaning they have a static position to accurately determine the position of the non-static part (the tag). In you case, you’d have a fully non-static model and would just need standard ranging information.
That means, that on the downside, you can’t really work with Qorvos RTLS system, as it is based on giving varying positions with Anchors and Tags.
Reading into the datasheet of the DWM1001, there is a nRF52832 processor on board as a master for the DW1000. This processor is capable of communicating via bluetooth (BLE). I’d suggest two things:
Use the BLE feature to check for nearby other BLE devices. After discovering a device, you’d have to communicate the initiator of the ranging action (For example, give every BLE controller a unique id and let the one with the lower id start the ranging process). This processor would then do a simple TWR (Two-Way-Ranging), resulting in data that can be computed as a distance.
As I think you’d not only want to know at which distance the nodes are to each other but also know how close the outer surface of your trucks are to each other, I’d suggest to add a gyro sensor to the system, that knows the rotation of your truck.
Hi @rvalverde
TDoA is nogo as you need to know distances or position and for TDoA you need a large infrastructure.
AoA I dont see as a good solution. With dual head DW3000 chip you can get only cca 120 - 160 degree cover i none plane so you will need to have more HW / antennas / synchronization and etc. This will be a very complex solution hard to do.
There is devkit in the preparation - All-in-One Ultra Wideband Demo Kit (Available end of April) - onanoff (there is already some delays) it will contain a infrastructure-less proximity demo between the Tags and this is probably what you need. It will give you the distance with all nearby nodes and it contains LNA (receiver booster) and PA (transmit booster, can be enabled/disabled), but the PA can be officially used only in EU within the new upcoming regulation.