Hi @DiogoFigueira
what do you use as an anchor? If you are using the plain module (DWM1001C) then you need to power it via proper power supply - I will strongly recommend to use +3.3V.
If you are using MDEK (DWM1001C-DEV) and if you power it via USB then you can normally use the +5V power source.
@leapslabs as far as I am aware, the DWM1001C-DEV board runs with a nRF52832 chip, doesn’t it?
The only STM based chip I can find in the datasheet) is the motion sensor.
@Rass if we are talking about the nRF52832, there is no way to “bypass” it, as it is the controller that controls the DW1000 chip. Same goes for the motion sensor, as it is placed on the same pcb as the rest (the DWM1001). You could however use the raw DW1000 chip with your own microcontroller.
nRF52832 is probably what I am seeing consuming 0.2-0.5 mW between the TWR frames
That’s not too bad.
One thing is still not quite clear actually: It’s ok to power the DEV board with 4.2V but not the DWM1001C directly. But if I desolder the 6 jumpers on the board, doesn’t it become DWM1001C?
Or the power goes through the nRF52832 chip and then to dwm1001c?
the DWM1001-C itself is a board that should make development easier by combining the DW1000 chip with the nRF52832 as a microcontroller and a motion detector. All that is placed on a single pcb (see the following picture).
The rest is part of the DEV board, which includes a USB interface, J-Link, custom buttons, LEDs, etc.
I actually don’t exactly know what 6 jumpers you are talking about, so I can’t tell if it would work the way you want it to work.
One thing I might want to add is that the power consumption between the TWR frames could also be partly explained by the DW1000 itself. You can check out this application note (chapter 5) to see how the DW1000 chip still draws some power even in deepsleep mode.
Yeah, it really isn’t that clear if you don’t also check the DWM1001 datasheet itself .
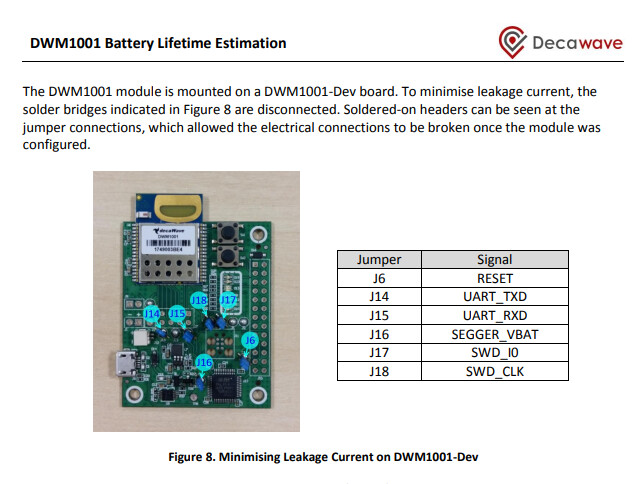
Regarding the jumpers, it seems like it disconnects the J_LINK interface between the USB Micro port and the chip itself, resulting in less power consumption as no current can leak towards this interface. Other than that, the interface gets its power by the USB Micro port.
If you check out chapter 8 of the same document (DWM1001 Module Development Board Datasheet) you get some more explanation towards what those jumpers actually do.
Long story short: By desoldering those jumpers, you would only disconnect the J_LINK interface from the chip, but that does not mean that you have a raw DWM1001-C.
Sadly, I don’t have one of these modules at hand right now and none images I could find were high quality enough, but there is a high propability that one of the pcbs components is a voltage regulator, which would allow you to use a higher voltage range than the DWM1001-C would allow.
PS: I’d recommend you to text me further questions in private or open a new topic, as the original question asked by Diogo got answered a while ago