Hello all,
i have an [color=#3c444f][size=medium][font=Montserrat,]DWM1001-DEV system with [/font][/size][/color]4 anchors and 2 tags, and i am able to use the android app to track the tags.
Then i connected one of the anchors with a USB cable to my Mac machine and was able to use “minicom -D /dev/tty.usbmodem14411” to enter the shell mode and run the following commands:
dwm> ut
[000138.390 INF] uptime: 00:02:18.390 0 days (138390 ms)
dwm> apg
x:1580 y:0 z:0 qf:100
After that i keep trying to issue lep, les, or lec commands but get no results:
dwm> lep
dwm>
I tried connecting to the “initiator” anchor and another normal anchor but with the same behaviour.
Any ideas on what is missing ? and does receiving responses for the other commands (ut, apg) mean that i am properly connected to the shell mode?
Thanks!
Hi Haitham,
lep or les will work only on a listener (passive UWB) or a tag. It will not work on an anchor as they are not aware of the position of the tag.
Thank you,
Regards
Yves
Yes, i found that out today by trial and error.
i’m wondering if thats explicitly mentioned somewhere in the documentation, as i have not found a mention of that in the Firmware User Guide.
Hi!
Will lep or les work on a gate? Im trying to read the position of the tag with a shell command.
Hi Hans-Petter,
no, the les/lep commands are available only on the Tags or on the Listener (a node with UWB Passive).
The position of the Tags on the bridge can be obtained only via SPI. This is done by the DWM Kernel Module available on the Raspberry Linux Image.
Cheers,
TDK
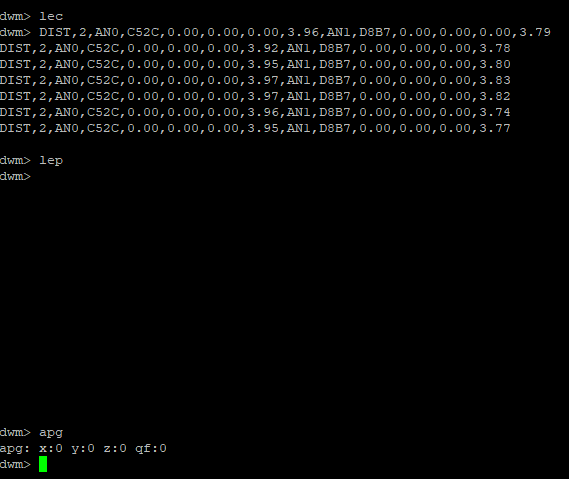
Hey,
I am using dwm1001 with Arduino but to make it simple i use USB to test. I have created a netwoek with 3 anchors (would have 4 but I fried one) and one tag. I am able to use the shell mode lec command easily but I want to use either lep or apg so there isn’t as much data to store and because its easier data to work with. However, it only returns blanks or 0’s. Here is a screenshot, thanks in advance for any help.