Hi. im doing a project and i need an accurate masurement of the dictance between 2 objects. for my case, the dwm3000(as anchores) and dwm3001c(as tag) is perfect for the job. before ill buy 4 models (3 anchors and 1 tag) i really need to know the minimal dictance between each anchore that you need to have in order to recive a reliable outcome (10 cm from what i read). so i reall dont kmow if to trust gemini becuse im really limited in space (about 20-50 cm). didnt really find answers online, if someone know and can help me - it will be much appreciated. thanks!
In theory the system can measure down to a distance of 0.
There are a couple of things that mean that in reality there is a minimum distance.
For any significant accuracy you need to do some form of smoothing/averaging. Most systems have a fundamental assumption that distance can’t be negative. In order to ensure random noise doesn’t reduce the distance to a negative value (and so ruin your ability to average things) you need the distance to be at least 3 times the standard deviation of your measurment noise.
Under good conditions I will typically see a measurment standard deviation in the 2-3 cm region.
Secondly the system makes assumptions about antenna delays being constant. RF antennas act very differently when within the near field, you want to be at least 2 wavelengths away to avoid this. At 6.5 GHz (channel 5) the wavelength is 4.6 cm.
In summary it will work at very short distances however accuracy will potentially suffer. If you are looking at distances under 10 cm I’m guessing that accuracy matters.
This is all assuming you are talking tag to anchor distances.
If you are talking about putting 3 anchors next to each other and then having the tag further away measuring the range to each anchor then that is a different matter.
Since the ranges measured are larger and the anchors aren’t directly talking to each other then they can be very close together. You will however still get some slightly odd effects to their antenna patterns if the antennas are very close to each other.
However if you do this the position accuracy will be very poor. Look up the concept of geometric dilution of precision, it’s normally used in the context of GPS/GNSS but is also applicable here. The short version is that if all your anchors are in the same direction from the tag then any range errors will result in significant position errors. For good position accuracy you want anchors to be on all sides of the tag.
thanks for the replay andy! i was not clear enough so its going to be a bit long but very very helpful for me.
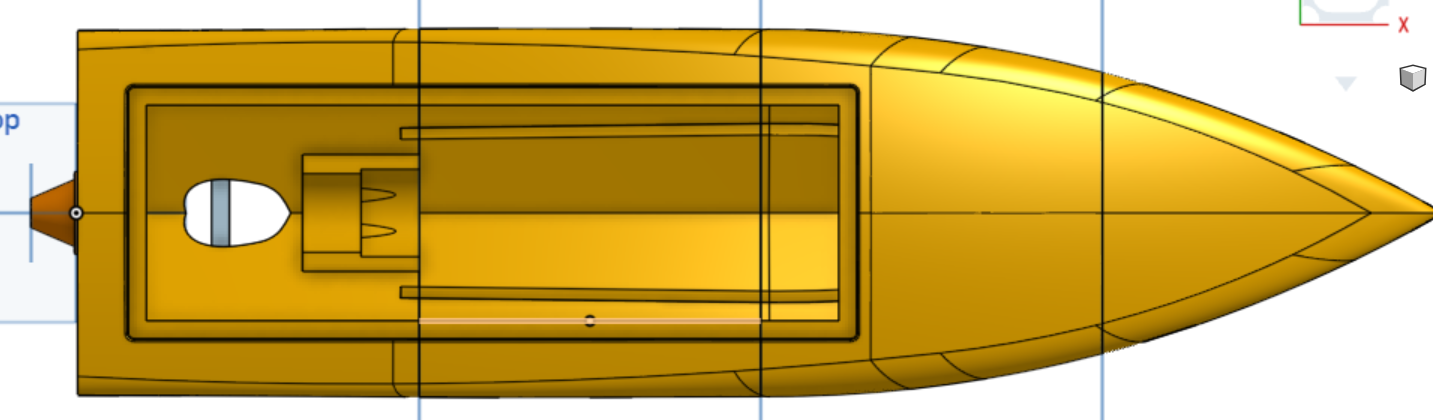
in short,i am building an autonomous boat that needs to get to a preson’s bracelet in case of him drowning. this is not a full startup but an intermidiate level project so were looking to be perfect but to seceed in that mission in out limited time window. ok so this is the 3D model of the boat were looking to print and use: Onshape
it will be approximately 90 cm long and 23 cm wide. so like i said, were planing to send the gps coordinates via LoRa models and because the gps is not that accurate, we want to use the UWB to handle the “final approach”. so we tought to put 3 anchores (DWM3000) and 1 tag (DWM3001c). and im basiclly afraid that the dictance between the 3 anchores (not between the the tag and the anchores) wont be big enough. so a couple of questions: 1: is the solution of using the UWB system possible for our kind of project? and is so, where would you stratigiclly place the 3 anchores? (i know not to put them near the engine, battery, or big wires that would alternate they’re electromagnetic field); this is a screen shot of the top view, if you’de like to mark where woulde you put them,
2: as i said im also using LoRa (868 Mhz) and GPS (L-Band - 1550-1600Mhz), do you thing these will hurt the UWB preformence? i read that these shouldent disturbe each other, but its always good to hear a second opinion. 3: if you think i need to know or consider anything else, please let me know! thank you so much for your help!!!
So you have a tag on a person in the water and want to guide the boat to them.
First issue I can think of is that a braclet on their arm is going to be under the water which means it’s not going to be getting any GPS or UWB signals.
Even if it is above the water it’s not going to be far above it which means your range is going to be terrible. But that’s OK, GPS should get you to within a meter or so.
For the UWB I would have thought to obvious arrangment would be one right on the front so you can get a clear range to target and avoid running into them. And then one on each side, the further out you can get them the better. So right on the edge at the widest point. All mounted high enough to have a good view of the water without the body of the boat blocking the signal for anywhere you expect the person to be.
-
GPS is receive only so that’s not going to jam anything. LoRa is so far off UWB frequencies that that’s not going to be an issue either.
-
To be honest if I was asked to design a system along these lines I’d use GPS for approximate location and probably look at a camera based system for the final approach. While UWB would work well for something like this on land I can see the added complexities due to the water blocking signals making it less than ideal at sea. The last thing you want to do is get their arm alongside while hitting their head with the boat.
thanks Andy. much appreciated!