Hi, everyone.
Recently,I use the DWM1001-examples(https://github.com/Decawave/dwm1001-examples/tree/master/examples 3) as the software for DWM1001 hardware
/* Retrieve poll transmission and response reception timestamps. See NOTE 5 below. /
poll_tx_ts = dwt_readtxtimestamplo32();
resp_rx_ts = dwt_readrxtimestamplo32();
/ Get timestamps embedded in response message. /
resp_msg_get_ts(&rx_buffer[RESP_MSG_POLL_RX_TS_IDX], &poll_rx_ts);
resp_msg_get_ts(&rx_buffer[RESP_MSG_RESP_TX_TS_IDX], &resp_tx_ts);
/ Compute time of flight and distance, using clock offset ratio to correct for differing local and remote clock rates */
rtd_init = resp_rx_ts - poll_tx_ts;
rtd_resp = resp_tx_ts - poll_rx_ts;tof = ((rtd_init - rtd_resp * (1.0f - clockOffsetRatio)) / 2.0f) * DWT_TIME_UNITS; // Specifying 1.0f and 2.0f are floats to clear warning distance = tof * SPEED_OF_LIGHT;
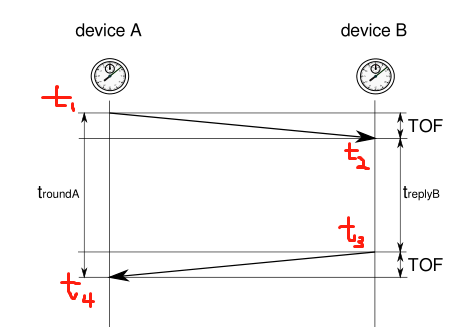
I have a little confuse of the meaning of poll_tx_ts, resp_rx_ts, poll_rx_ts, resp_tx_ts
Could you please help me answer which of t1, t2, t3,t4 in this picture is represented by poll_tx_ts, resp_rx_ts, poll_rx_ts, resp_tx_ts respectively
It’s confused me. I need some help. Thanks!
Best regards!