This isn’t correct. No pure aloha system (like the Zebra DART) can have the system capacity that a fully slotted system can have.
To illustrate, here are the system capacities for pure aloha and slotted aloha:
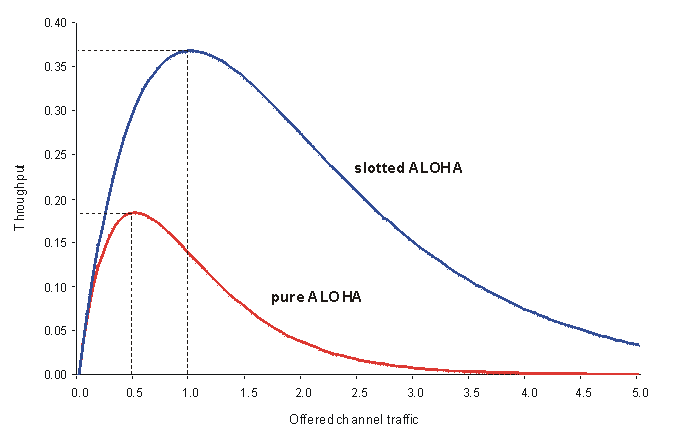
In pure aloha, which is what the DART system is, the tag transmits with jittered time intervals. The maximum non collided system capacity occurs when the offered traffic is 50% of channel capacity and in that case, 18% utilization occurs (36% of the packets get through cleanly). If your offered traffic goes higher, then you actually get less throughput due to the rapidly increasing probability the packets collide. Since tags only transmit, they never know when they are on the backside of the curve if the tag density increases so the system fails to perform and there’s no way to manage that other than reduce the number of tags in the area.
An improvement on pure aloha is slotted aloha where packets can only be offered at defined internals. This requires tags which can synchronize to a clock so is rarely done since it is a small step to a fully slotted system once you have that.
A fully slotted system has tags that periodically receive network synchronization messages and are assigned a specific slot that assures no collisions. Thus you can achieve 100% system utilization and suffer no packet losses.
We’ve built systems that have been pure aloha, slotted aloha, and fully slotted. They each have a place of utility, but the capacity winner is always the fully slotted.
There is a further practical factor that makes aloha systems worse. The user may have a requirement that they hear from a tag every so often. Let’s say that is within 3 seconds. If you set the aloha interval to 3 seconds, then a collision means you miss that packet. So, to compensate, you set the interval to 1 second and hope you don’t miss 3 packets in a row. In essence, the unpredictability of aloha leads users to set the interval faster leading to more collisions. This doesn’t happen in a slotted network since the system is predictable.
Our TDoA system operates at 3400 locates per second and we expect to increase that to over 6000 soon. So we are already doing better than the DART claimed rate of 2000 LPS. Having worked with those who have used the DART system, the quality of output at 2000 LPS is fairly poor as well, often requiring post filters to sort out the mess. You don’t have that in fully slotted.
As to battery life, an aloha system is not significantly less battery usage than a properly designed slotted system. The key to this is what we call “low power precision sleep”. It takes about as much power to run an RC timer as a 32 KHz crystal timer, so if you can model the crystal accurately enough, you can sleep long periods of time and wake up with microsecond precision and hit your slot. In our experiments, we can listen for a network time sync about every 2 minutes and maintain microsecond time slot lock. While that receive does take some power, it is on for only about 120 us in 2 minutes, that’s a duty cycle of 0.0001% which makes average receive power less than half a microwatt.
The ability to send the tag a message also saves power. You can control the tag beacon rate to lower it if the tag isn’t moving much, or if the tag is away from the network, it can go silent and wait to be back on network. If the tag density increases in an area, tags can be told to slow down. With a slotted tag, the user is assured of a regular interval so sending “extra” beacons is reduced. All of these factors make slotted tags LESS overall power in practical applications.
A further complexity is that the DART system tags transmit all the time which makes shipping them a problem. A slotted tag will cease after a certain time off network and restart when it hears a network again.
If maximum system capacity is your goal, aloha is not appropriate, you need fully slotted.
Mike Ciholas, President, Ciholas, Inc
3700 Bell Road, Newburgh, IN 47630 USA
mikec@ciholas.com
+1 812 962 9408