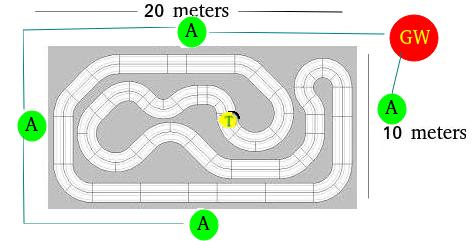
We are working on an outdoor test track for a trackless vehicle. We are developing an Arduino UNO compatible board to host the DWM1000 and communicate back to the gateway via Ethernet. Our customer base prefers using Ethernet or RS485 where possible. The location server will be a web service using NodeJS, div tags to track the vehicles location.
Our track is above. We plan to only run one vehicle at a time to start.
Any comments will be greatly appreciated.
I read somewhere that a top speed of 11mph was possible while maintaining 10cm location accuracy. Is that true? Is there an end of life for the DW1000 in the coming future? Thank you!
Using PANS that sounds about right. Each range is measured at a slightly different time, position calculation generally assumes all the ranges were measured at the same time. Unless compensated for any movement over the time taken to make the measurements is going to result in an increase in position error. 11 mph = 5 meters/s. At that speed if PANS takes 50ms to measure the ranges then that’s going to add 2-3 cm worth of additional error to the position calculation.
This isn’t a limitation of the DW1000 itself, it’s a limitation of the range measurement and position calculation code. We use a different non-PANS based system and maintain 3-5 cm accuracy at 100 km/h (60 mph). In theory the system can work up to twice that speed but it’s hard to find an indoor area where you can go that fast safely.
The other issue you may hit is system latency. If you are trying to control something moving you need to get the position into your control code with as little delay as possible. The faster you are moving the more important that delay becomes.