Dear Sir,
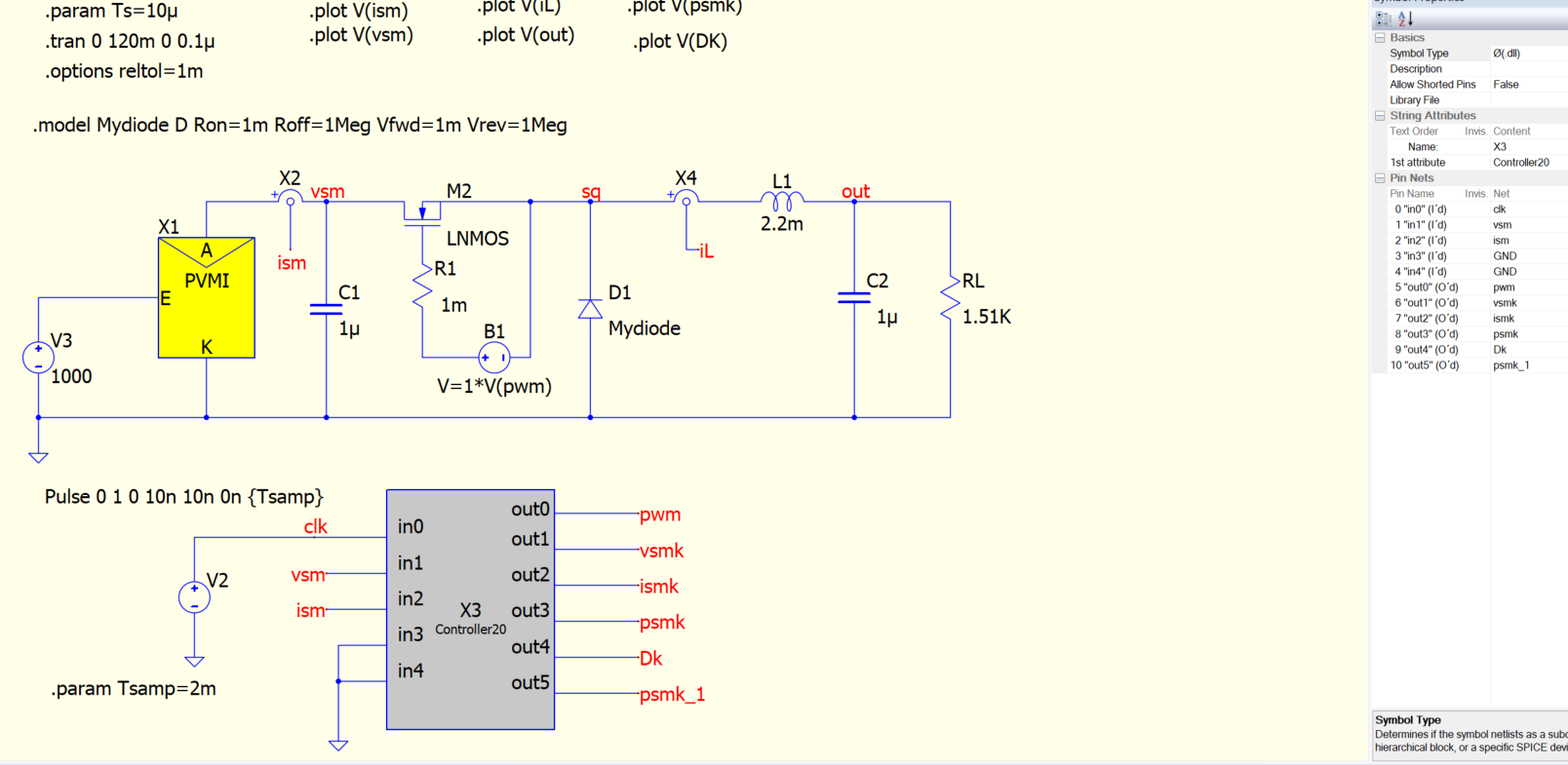
We created a X3 controller for the schematic and it shows some error with
“Fatal error: No evaluation function found in controller20.dll”
Could you please provide your suggestions? Thank you.
Code:
// Automatically generated C++ file on Tue Jan 13 22:31:53 2026
//
// To build with Digital Mars C++ Compiler:
//
// dmc -mn -WD -o controller20.cpp kernel32.lib
#include
double Ts = 10e-6; // Switching period (100kHz, 10us)
double Dk = 0.1, Dk_1; // Previous Duty Cycle
double Sawtooth; // Sawtooth waveform
double vsmk = 0.1, vsmk_1; // Voltage samples
double ismk = 0.1, ismk_1; // Current samples
double psmk = 0.1, psmk_1; // Power samples
//double last_clk = 0;
union uData
{
bool b;
char c;
unsigned char uc;
short s;
unsigned short us;
int i;
unsigned int ui;
float f;
double d;
long long int i64;
unsigned long long int ui64;
char *str;
unsigned char *bytes;
};
// — DLL Entry Point (Do not modify) —
int __stdcall DllMain(void *module, unsigned int reason, void *reserved) { return 1; }
#undef in0
#undef in1
#undef in2
#undef in3
#undef in4
#undef out0
#undef out1
#undef out2
#undef out3
#undef out4
#undef out5
extern “C” __declspec(dllexport) void Evaluation(void **opaque, double t, union uData *data)
{
double in0 = data[0].d; // clk (Sampling Clock)
double in1 = data[1].d; // vsm (Voltage Sensor)
double in2 = data[2].d; // ism (Current Sensor)
double in3 = data[3].d; // vsm (Voltage Sensor)
double in4 = data[4].d; // ism (Current Sensor)
double &out0 = data[5].d; // pwm (PWM Output)
double &out1 = data[6].d; // vsmk (Monitor V)
double &out2 = data[7].d; // ismk (Monitor I)
double &out3 = data[8].d; // psmk (Monitor P)
double &out4 = data[9].d; // Dk (Monitor Duty)
double &out5 = data[10].d; // psmk_1 (Monitor Prev P)
Sawtooth = t/Ts - floor(t/Ts);
if (Dk > Sawtooth)
out0 = 5.0; // Turn ON (Gate Drive Voltage, e.g., 5V)
else
out0 = 0.0; // Turn OFF
if ((in0 > 0.999) && (in0 <= 1.001))
{
// 1. Shift Registers (Save history)
vsmk_1 = vsmk; vsmk = in1; // Update Voltage
ismk_1 = ismk; ismk = in2; // Update Current
psmk_1 = psmk; psmk = vsmk * ismk; // Calculate Power = V * I
Dk_1 = Dk; // Save Duty Cycle
// 2. MPPT Core Logic
// Compare current power with previous power
if (psmk > psmk_1)
{
// Power increased: keep moving in the same direction
if (vsmk > vsmk_1)
Dk = Dk_1 - 0.02;
else
Dk = Dk_1 + 0.02;
}
else
{
// Power decreased: reverse direction
if (vsmk > vsmk_1)
Dk = Dk_1 + 0.02;
else
Dk = Dk_1 - 0.02;
}
// 3. Saturation (Safety limits for Duty Cycle)
//if (Dk > 0.9) Dk = 0.9;
//if (Dk < 0.1) Dk = 0.1;
}
// ==========================================
// 4. Update Monitor Outputs
// ==========================================
out1 = vsmk;
out2 = ismk;
out3 = psmk;
out4 = Dk;
out5 = psmk_1;
}
Best Regards
Shawn