Your second diagram is for a single sided ranging solution rather than double sided.
Double sided (3 message minimum)
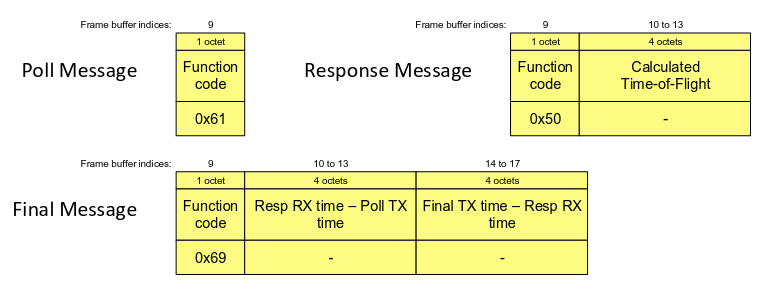
Message 1 - Tag sends a start message.
Message 2 - Anchor sends a reply
Tag receives the reply.
Anchor now knows the Rx time of message 1 and the Tx time of message 2
Tag knows the Tx time of message 1 and the Rx time of message 2
Tag uses the delayed transmit feature to schedule the transmission of message 3 for a future time.
Message 3 - At the set time the tag sends a message containing two data items: The delta between M1 Tx and M2 Rx and the delta between M2 Rx and the scheduled M3 Tx time.
Anchor receives message 3 and reads the values it contains. It now knows the time differences between all 3 messages for both the tag and the anchor.
The other option is to not use the scheduled transmit feature and instead send a 4th message with the final messages time information. This is less efficient and slower since it involves 4 messages. But it avoids the need for a scheduled transmit, everything can be sent as soon as possible which buys you a little time back. Normally you’d only do this if you wanted the tag to calculate the distance rather than the anchor.
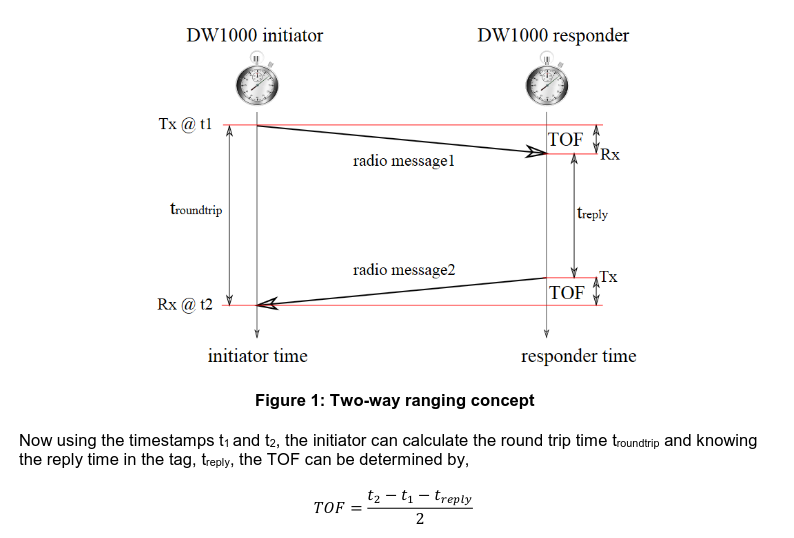
Single sided (2 message minimum):
Message 1 - Tag transmits.
Message 2 - Anchor receives the message, sets the response to be transmitted a known time after the message reception.
The tag knows its transmit and receive times. It knows the difference between the anchors transmit and receive times. Subtracting one from the other leaves the time of flight.
The issue with single sided ranging is that the anchors tReply is timed on the anchor clock, the tags time difference is measured on it’s own clock. These clocks are running at very slightly different rates. The difference is small but since tReply is large compared to the time of flight it doesn’t take much of an error to result in large range errors.
To compensate for this the chip can generate an estimate of the difference in clock speed between the two devices, this can then be used to scale the tReply value and so give a more accurate range.
If you don’t apply this correction you will get a significant range error. If this is the cause then the range error will vary with temperature and swapping the roles of tag and anchor will flip the sign of the error, 3 meters long will become 3 meters short.
You don’t need to do this correction for double sided ranging, in DS-TWR you in effect measure this error twice, once in each direction. Since it’s done twice in opposite directions the errors cancel out.
The other big difference between SS-TWR and DS-TWR is where the range is calculated. Assuming the minimum number of messages using SS-TWR the initiator is the one that can calculate the range. Using DS-TWR it’s the target device that can calculate the range.
As for the range error you are seeing - if you are doing single sided ranging then swap the roles, if the error changes from being too long to too short then it’s the clock correction. If after doing this the error remains the same or you are using double sided TWR then it’s probably an error with your antenna delay calibration.
Both of these will give a fairly constant error. If the range error is highly variable or changes significantly depending on range then it’s probably something else.