Hi,
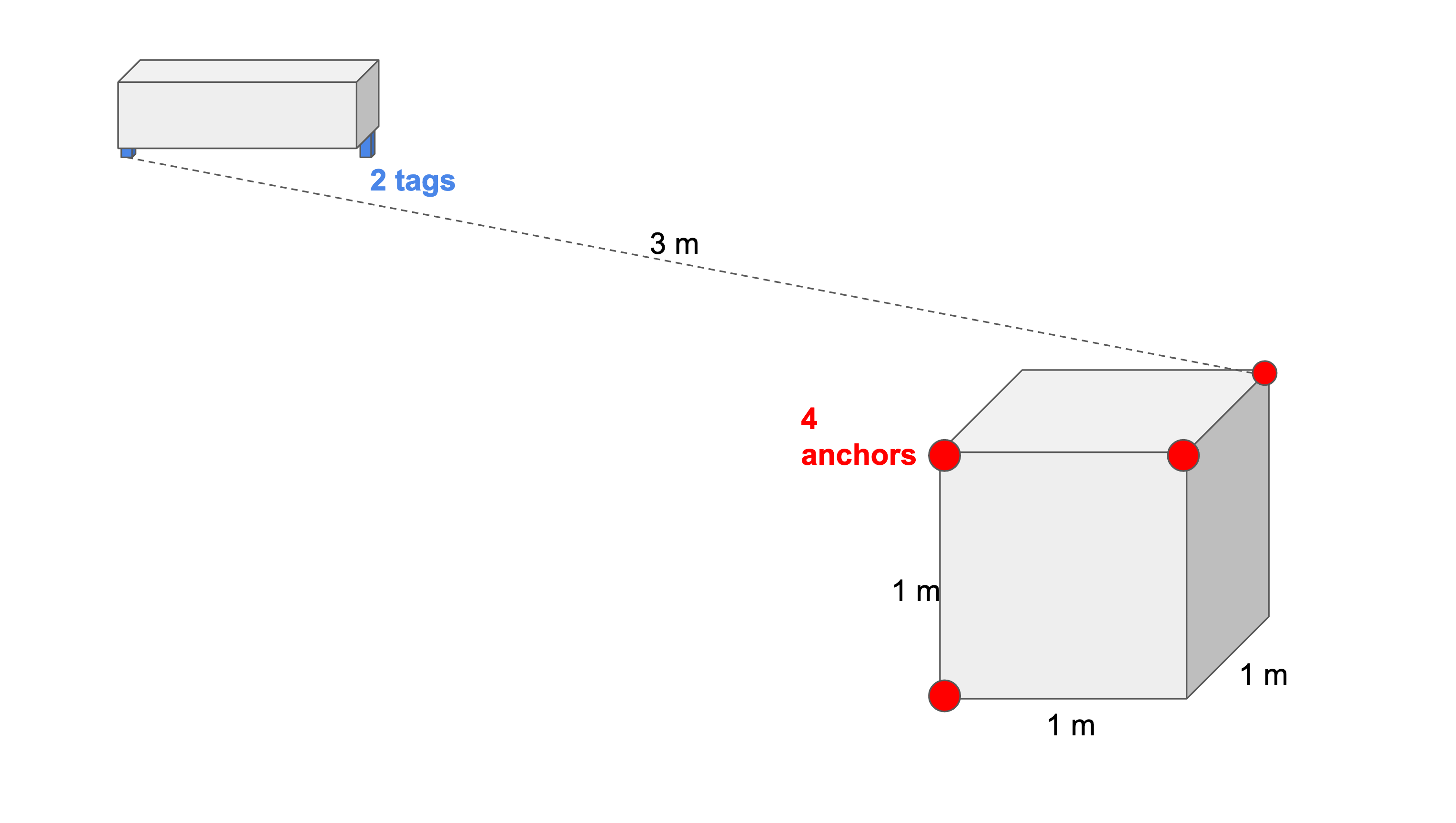
My robotics project is on quadcopters (drones) and I am exploring the use of DWM1001-Dev for indoor localization. Specifically, I am trying to bring the drone to a 1 m^3 cube zone within a 3 m radius, where the cube zone is the only placement location for anchors / tags. My questions regarding the DWM1001-Dev:
-
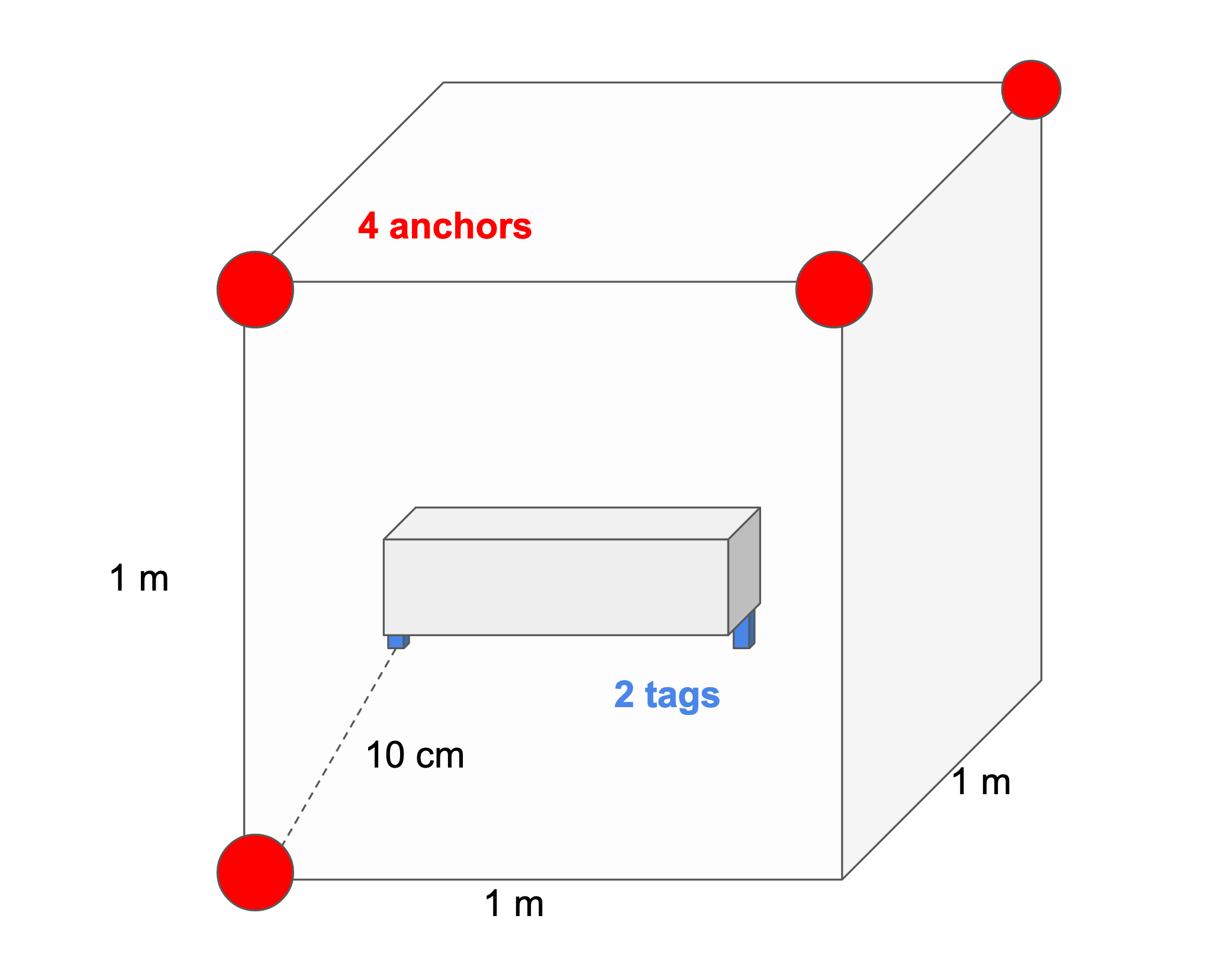
What is the minimum distance between anchors? In other words, if anchors are spaced 1 m apart from one another, is it possible to attain cm level position accuracy in a 2-tags, 4-anchors system (assuming constant LOS)?
-
Can relative distance be measured in a 1-anchor (moving) + multi-tags (stationary) system? I understand 1A + 1T system provides only relative distance measurement between the two nodes and usually the anchor is fixed in place. I was wondering if I can get multiple distance measurements between a moving anchor and multiple stationary tags?
-
Can distance be measured in a 1-anchor (stationary) + multi-tags (moving) system? What if the system is similar to 1A + 1T, where the anchor is fixed in place, can relative distance be measured between an anchor and multiple moving tags?
-
What is the minimum distance between an anchor and a tag?
Thank you in advance for your help and comments. You are greatly appreciated.