Hi guys,
I am trying to develop system for motocross tracking where I am using DMW1000 modules. I am using two subsystems (2 channels, Ch2 and Ch5) each channel use 3 anchors to track 4 tags. On tag board I have 2 DWM1000 modules to increase range (ch2 covers one half of area and ch5 covers second half). My problem is I think in time slots synchronization, because when one tag is too far and it’s not visible by anchor 0, system is not working correctly for all tags (it’s no receiving distance messages) I think it’s loosing synchronization between time slots. When I turn off this tag, everything is coming back to normal work, or when this tag comes back to area where is visible by anchor 0. Do you know the way to fix this problem?
I am new Decawave user and don’t know exactly how sleep and deep sleep works (my deep sleep is enable), maybe this could be a problem?
I would be really thankful for any help.
Hi,
Your Anchor , does that also have 2x DWM1000, and so 2 channels?
When TAG 1 is on the move are the 3 other tags on the same channel , and so the system (3 x anchors) can locates all 4 TAGS?
Then when TAG1 is out of range (what is the range?) , the 3 other TAGS stop, they cannot be located any longer?
Sleep and deepsleep is described in the user manual. We also have example code to put devices into sleep (and wake up).
Maybe don’t put your devices into sleep for the moment and so rule out or confirm if there is a sleep issue.
Would you control your 2 x DWM1000 with 1 MCU . If so, it could also be an issue with the MCU interface . Are you using a MCU with a few SPIs or are you using CS?
But why are you using 2 channels, and not more anchors? What ranges do you get and require?
Also please state what software you are using. Because if you use TREK1000 Software the system will still work if 1 TAG is out of range.
/Leo
This is how our system looks like on the racetrack:
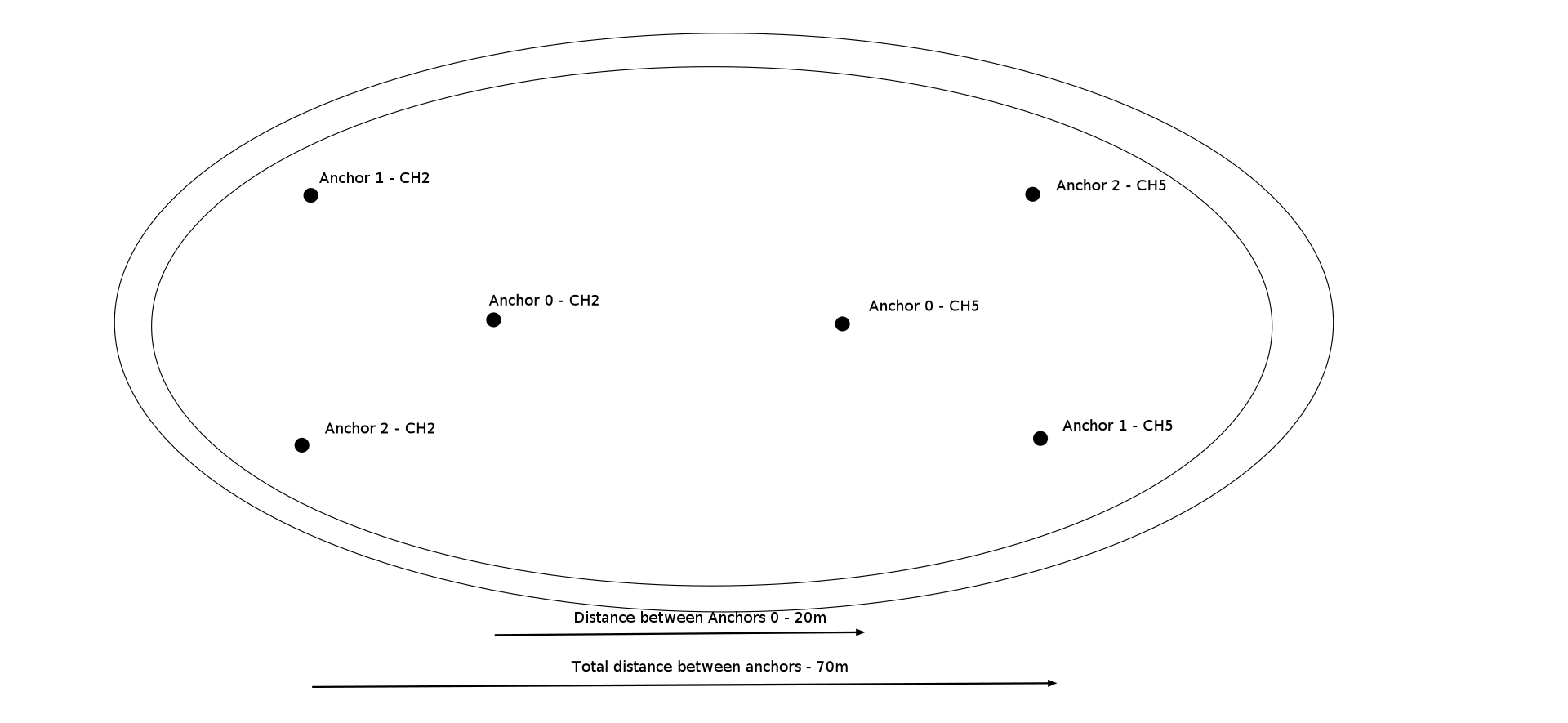
Our anchors are Decawave TREK1000 boards with default firmware.
Our tags are customized by us. There are 2 x MCU and 2 x DWM1000. For tags we also use default TREK firmware.
We use 4 tags during race, when channel doesn’t see one of them, fps of other tags are decreasing immediately, and often after few seconds other tags are not responding. When we turn off this tag which is out of range, system come back to normal work. And also when all the tags are in range, the system is working correctly.
We require quite long range for channel (about 100m) and high fps(25fps per channel) that is why we are using 2 channels.
We also noticed, that when instead of our tags with DWM1000 we program TREK boards as tags with the same firmware, this problem doesn’t exist, so this could be maybe wrong configuration for DWM1000 (we use configuration files from TREK and didn’t change it) or maybe some current problem?