hi everyone,
I experimented with SS TWR using two ESP32 DW3000 boards. Specifically, the Tag sends a Poll to the Anchor, and upon receiving it, the Anchor sends a response back to the Tag. Finally, the Tag calculates the distance based on the time of flight. In the Anchor’s code, before checking the received Poll’s SRC and DEST addresses, I added the following function to read this information from the Poll.
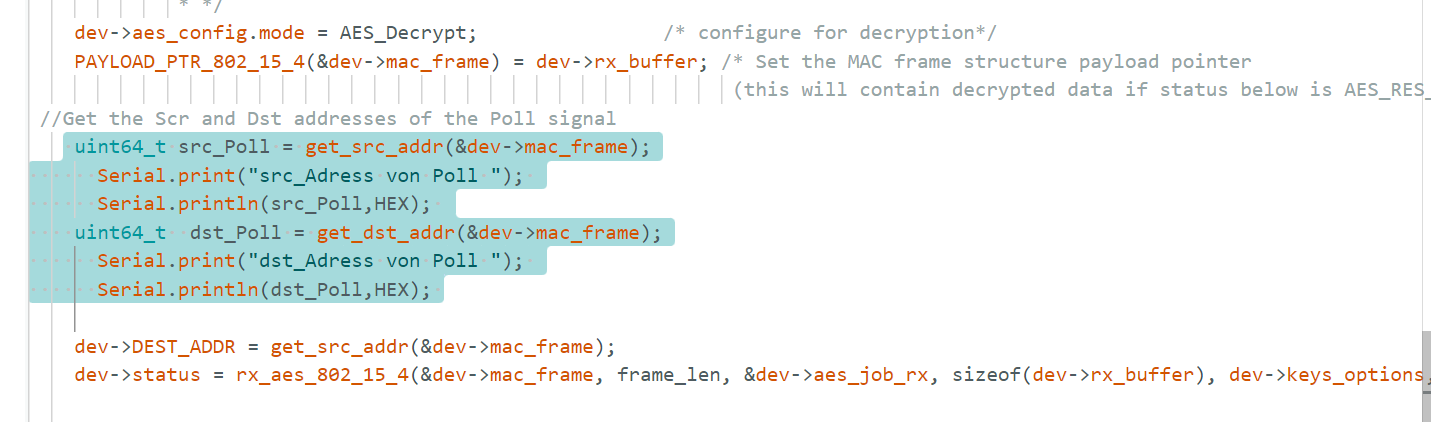
In the output results, it seems that after the Anchor receives the Tag Poll, it also receives its own acknowledgment, as the SRC and DEST addresses in the second received Poll are swapped. Is this behavior normal?Or did I possibly make a mistake in my code?
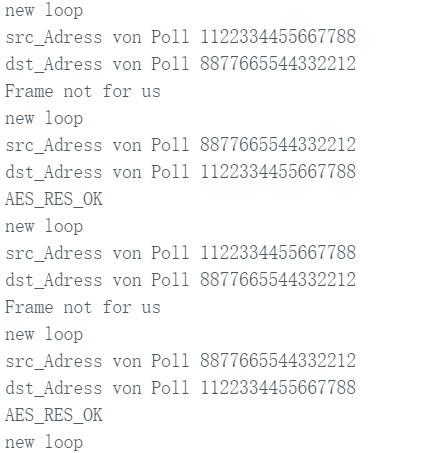
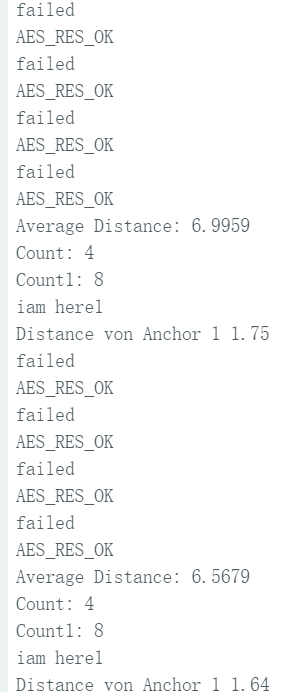
his also results in my Tag not always receiving a response from the Anchor during measurements. If this is the case, how should I adjust my settings to avoid this situation?
Thanks