1. Introduction
Previously, I wrote several articles about building a UWB precise positioning system using TDOA technology from scratch. The TDOA technique described in those articles was Uplink TDOA. Recently, I completed a full implementation of a UWB precise positioning system based on Downlink TDOA technology. During my research on Downlink TDOA, I published several related articles. Now, I am consolidating all the information and combining it with recent insights into this comprehensive article.
This article is written for hardware and software engineers who have embedded development experience but no prior UWB positioning background. Therefore, before diving into system design, I will spend some time covering the fundamentals of UWB and TDOA positioning. If you are already familiar with these topics, feel free to skip ahead to the sections that interest you.
1.1 UWB Overview
Before getting into the TDOA positioning principle, let’s first introduce the basic concepts of UWB (Ultra-Wide Band) to help engineers without a UWB background quickly build a foundational understanding.
What is UWB?
UWB is a short-range wireless communication and ranging technology. It is governed by the IEEE 802.15.4z standard (published in 2020, which enhanced security and ranging accuracy based on the earlier IEEE 802.15.4a standard). UWB is fundamentally different from traditional WiFi and Bluetooth:
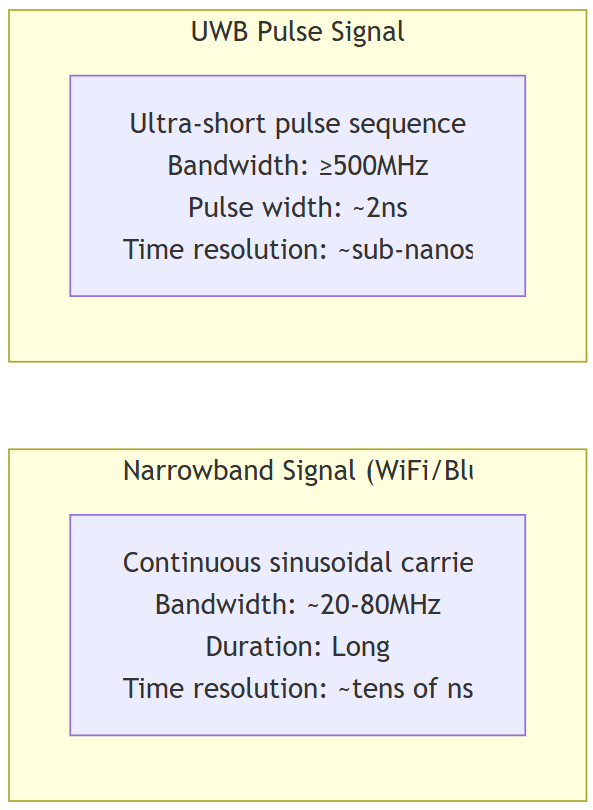
- WiFi/Bluetooth use continuous sinusoidal carrier waves to transmit data, with the receiver demodulating the carrier to recover information. These signals typically have bandwidths of only a few tens of MHz (an 80MHz WiFi 5 channel is already considered wide).
- UWB uses extremely short pulses (typically sub-nanosecond to a few nanoseconds wide), with signal bandwidths of 500MHz or more. It’s called “Ultra-Wide Band” precisely because of this enormous bandwidth.
Here is a simplified comparison between these two types of signals:
Why does “wider bandwidth” mean “better positioning accuracy”?
This can be understood from both time-domain and frequency-domain perspectives:
- Time-domain perspective: The narrower the pulse, the higher the resolution on the time axis. UWB pulse signals can resolve down to the sub-nanosecond level. Since electromagnetic waves travel at the speed of light — 1 nanosecond corresponds to approximately 30 centimeters in air — if we can precisely measure signal arrival time, we can theoretically achieve centimeter-level distance measurement.
- Frequency-domain perspective: According to signal processing theory, the wider the signal bandwidth, the higher its time-domain resolution (i.e., the ability to distinguish two closely spaced signals). A 500MHz bandwidth corresponds to a time resolution of approximately 2ns, or about 60cm of spatial resolution. The chip’s internal oversampling and interpolation algorithms further improve actual precision well beyond this theoretical limit.
In comparison, WiFi signals have bandwidths of only a few tens of MHz, corresponding to several meters of resolution — this is why WiFi-based positioning (using RSSI or RTT) typically achieves only 1–3 meter accuracy, while UWB can easily achieve 10–30 centimeters.
How UWB Works — The Thunder Analogy
If you’re not yet clear on “time-based positioning,” imagine a thunderstorm: Lightning occurs instantaneously (light-speed propagation means virtually no delay), and only afterward do we hear the thunder (sound travels at approximately 340 m/s). By measuring the time difference between seeing the lightning and hearing the thunder, we can estimate how far away the lightning struck. UWB positioning works on a very similar principle, except we’re capturing electromagnetic pulses rather than sound waves. Since light travels extremely fast (approximately 3 * 10^8 m/s), the UWB chip’s internal timer must have extremely high resolution to precisely capture these brief time-of-flight differences.
The DW3000 Chip’s Timer
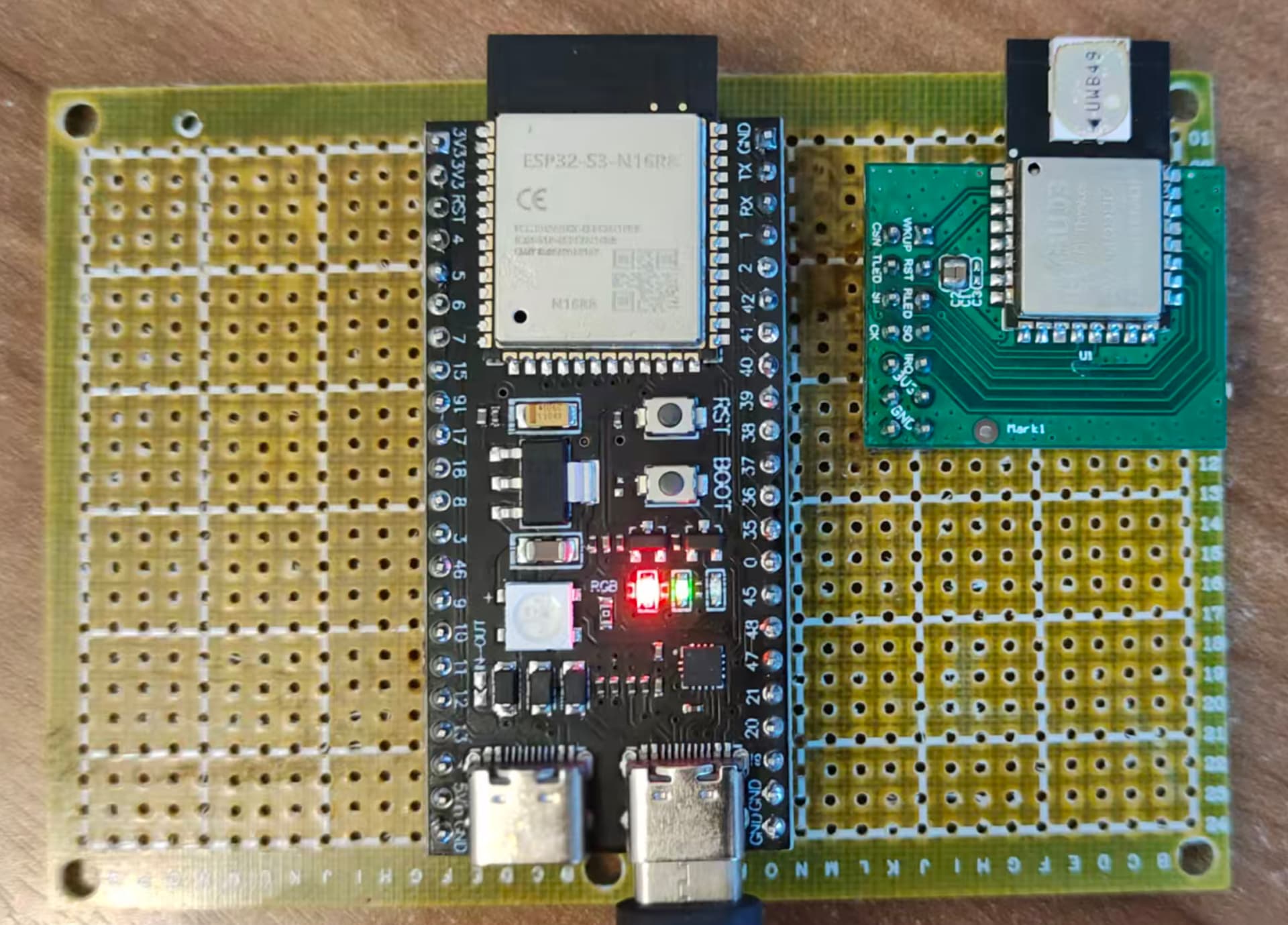
In this article, we use the Qorvo DW3000 UWB chip (Qorvo acquired Decawave). The DW3000’s internal timer is 40 bits wide, with a clock frequency of approximately 63.8976 GHz (meaning each tick has a time interval of approximately 15.65 picoseconds, corresponding to a spatial resolution of approximately 4.7 millimeters).
The 40-bit timer has a full-scale range of approximately 2^40 * 15.65 (ps) = 17.2 (seconds). This means the timer overflows (wraps around to zero) approximately every 17.2 seconds. This overflow must be carefully handled in software — if two timestamps are on opposite sides of the overflow point, a simple subtraction will yield an incorrect result. We will discuss how to handle this in detail in later chapters.
Tip: Although the 15.65ps timer resolution is extremely fine, this does not mean DW3000’s actual ranging accuracy is 4.7mm. Practical accuracy is affected by many factors, including antenna delay, multipath effects, clock stability, and more. Under ideal conditions (unobstructed, line-of-sight), DW3000 typically achieves ranging accuracy within ±10cm.
1.2 TDOA Positioning Principle
What is TDOA?
TDOA stands for Time Difference of Arrival. As the name suggests, it calculates the emitter’s position by measuring the time differences of the same signal arriving at different receiving points.
In fact, the GPS/BeiDou satellite navigation systems we use daily are essentially a form of TDOA — the GPS chip in your phone receives signals from multiple satellites and calculates the phone’s position based on the time differences of these signals’ arrivals. GPS/BeiDou use Downlink TDOA positioning, where the device being positioned calculates its own coordinates.
TDOA vs TOA/TWR:
Often mentioned alongside TDOA are TOA (Time of Arrival) and TWR (Two-Way Ranging). TOA calculates distance by measuring the absolute flight time from transmission to arrival, requiring strict clock synchronization between transmitter and receiver. TWR measures distance through two (or more) round-trip communications between sender and receiver, requiring no clock synchronization, but each ranging measurement requires bidirectional air-interface resources. TDOA only requires a unidirectional signal plus the time difference between receivers, without needing to know the absolute transmission time, making it more flexible and better suited for large-scale deployments.
Explaining the Principle Using Uplink TDOA
Downlink TDOA is more complex to explain, so let’s first use Uplink TDOA as an example to illustrate the TDOA positioning principle.
In Uplink TDOA, the Tag (the device to be positioned) transmits a UWB positioning signal, and nearby Anchors (base stations/reference points) receive this signal. Radio waves travel through air at the speed of light (approximately 3 * 10^8 m/s). Since each Anchor is at a different distance from the Tag, each Anchor receives the signal at a slightly different time — the farther Anchor receives it later, and the closer one receives it earlier.
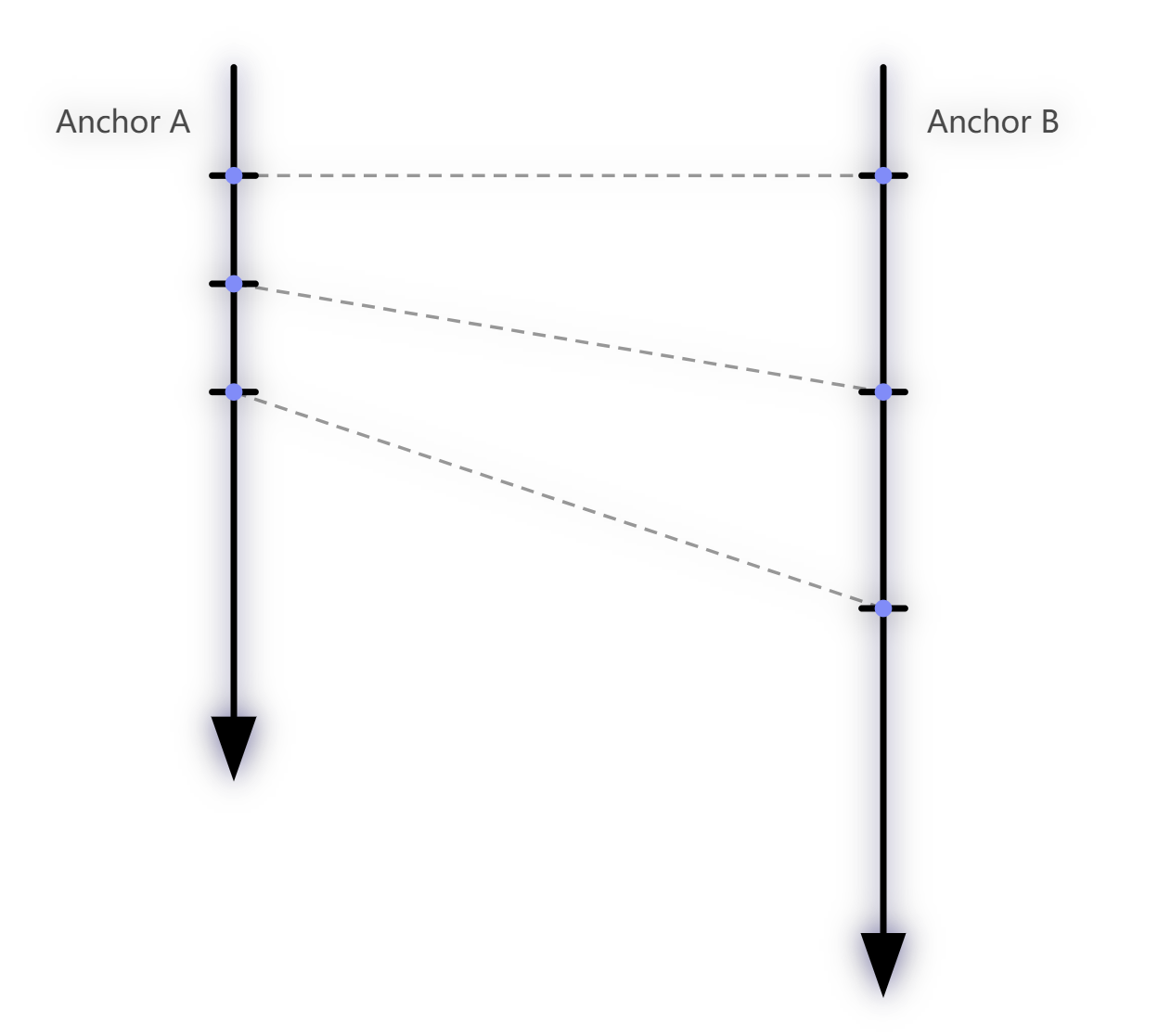
For example, consider two Anchors A and B, where Anchor A is farther from the Tag and Anchor B is closer. The two Anchors receive the signal at different times. Subtracting these two timestamps gives the Time Difference of Arrival of the Tag’s signal at Anchors A/B. Multiplying this time difference by the speed of light yields the distance difference between the Tag and the two Anchors.
The Mathematical Principle — Hyperbolic Positioning
From a mathematical perspective, let’s say the distance difference between the Tag and Anchors A/B is dAB. Using A and B as the two foci, we can draw a hyperbola on a plane (or a hyperboloid in 3D space). Every point on this hyperbola has the same distance difference dAB to A and B. In other words, the Tag must be located somewhere on this hyperbola.
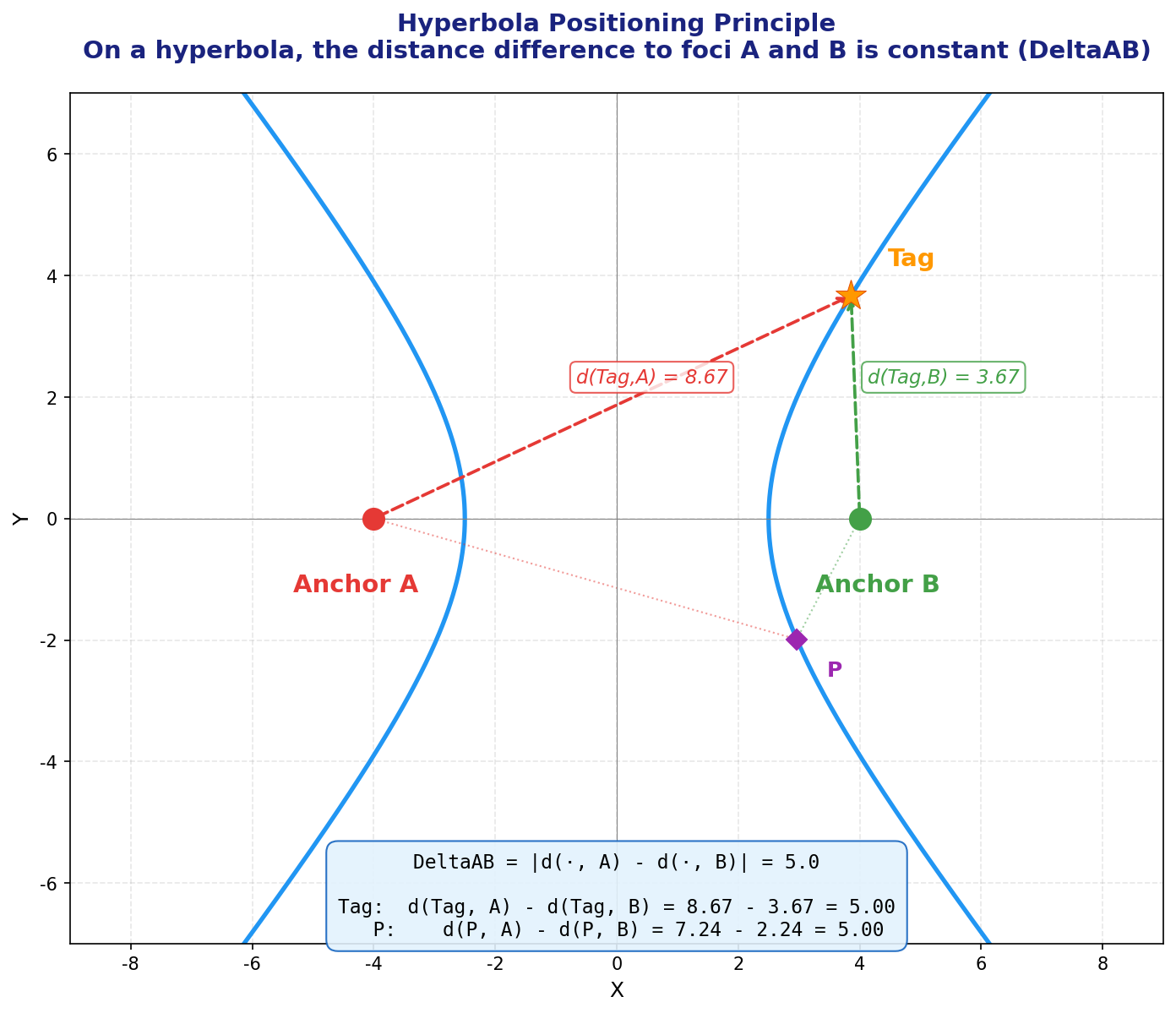
With just one hyperbola, we only know the Tag is somewhere on the curve — we cannot determine the exact coordinates. If we add another Anchor C, we get another independent hyperbola (e.g., with A/C as foci and distance difference dAC). The intersection of two hyperbolas (typically one or two points) gives the Tag’s candidate position(s).
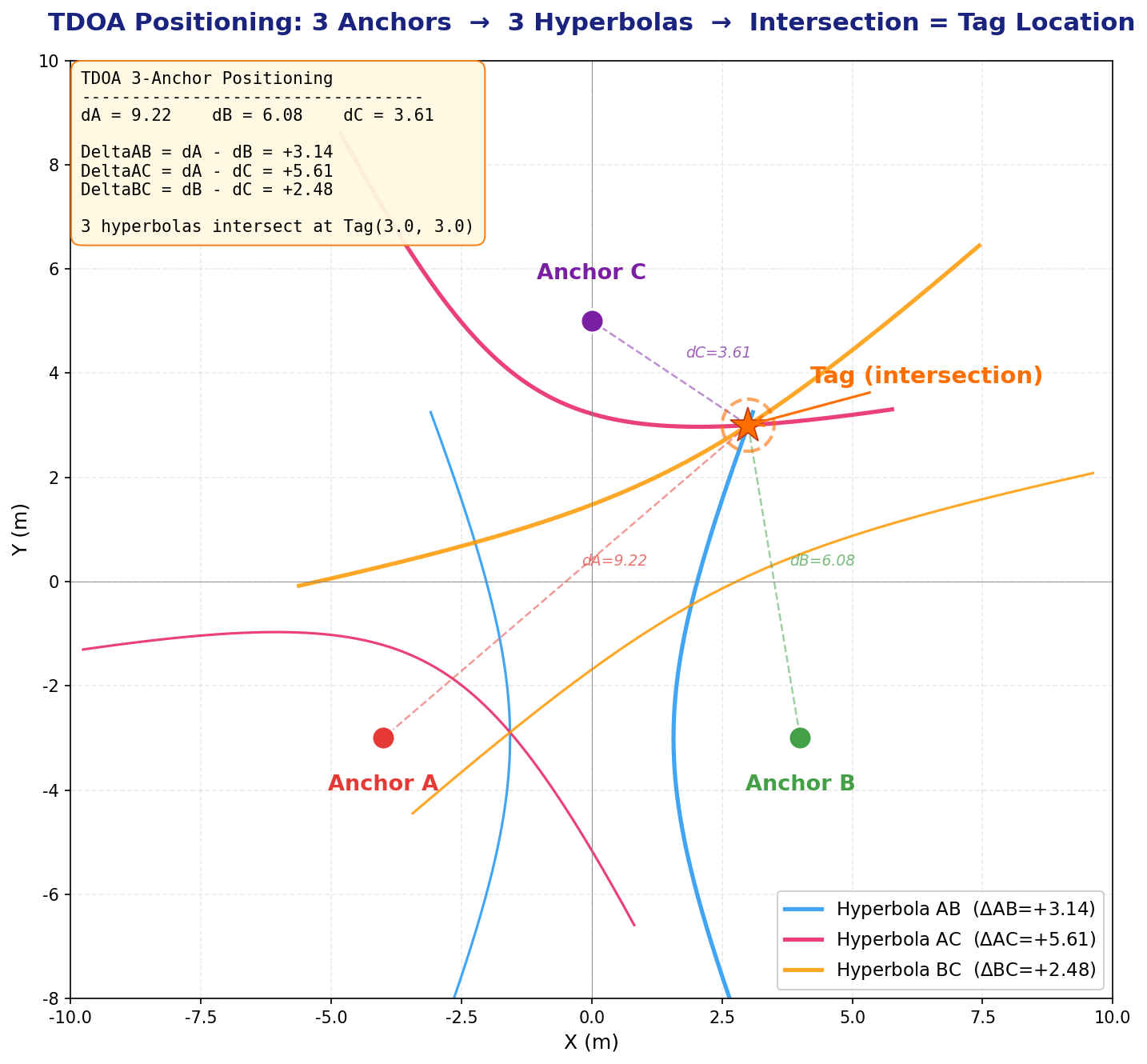
A Note on the Number of Independent Equations:
Some readers may wonder: don’t 3 Anchors give 3 pairs (AB, AC, BC)? Why only 2 independent hyperbolas? The reason is that dBC = dAC - dAB — the third time difference can be derived from the first two and provides no new independent information. In general, n Anchors produce n-1 independent TDOA equations.
- 2D positioning (solving for x, y): requires at least 3 Anchors (2 independent equations for 2 unknowns)
- 3D positioning (solving for x, y, z): requires at least 4 Anchors (3 independent equations for 3 unknowns)
Note: The hyperbola diagrams above are 2D illustrations to help you intuitively understand the positioning principle. In reality, our space is three-dimensional, and mathematically we’re dealing with hyperboloids. Three hyperboloids intersect along a curve (not at a point), so 3D positioning requires at least 4 Anchors.
Handling the Z-Axis
Even if we only want 2D positioning (solving for x/y), Anchors are typically deployed at elevated positions (e.g., on the ceiling at 3–5 meters height), while Tags are at lower positions (e.g., worn on a person’s chest at about 1.5 meters). There is a significant height difference between Anchors and Tags. Ignoring this height difference and calculating purely in a 2D plane would introduce systematic distance errors. Therefore, coordinate calculations must still be performed in 3D space, but we can fix the Tag’s z coordinate as a constant (e.g., 150cm). This way, the unknowns are only x and y, but distance calculations still account for the true 3D distances.
Improving Accuracy with More Anchors
In practice, we typically deploy more Anchors than the minimum required. The additional Anchors provide redundant information (an over-determined system), which can be processed using methods like least squares to improve positioning accuracy and robustness.
For 3D positioning, the vertical distribution of Anchors also matters — you cannot mount all Anchors on the ceiling at the same height. If all Anchors are on the same horizontal plane, information in the z direction is extremely weak (GDOP diverges in the z direction). Some Anchors should be deployed at lower heights, roughly at the same level as the Tag or even lower.
The Concept of GDOP (Geometric Dilution of Precision):
Similar to GPS satellite positioning, the spatial geometric distribution of Anchors has a huge impact on positioning accuracy. If all Anchors are clustered in a small area, the hyperboloids are nearly parallel, and small timing measurement errors will cause enormous coordinate deviations — imagine two nearly parallel lines where a tiny angle change shifts the intersection point dramatically. Conversely, if Anchors are evenly distributed around the Tag (ideally surrounding it from multiple directions), positioning accuracy is much better.
This is the concept of GDOP (Geometric Dilution of Precision). GDOP is a dimensionless multiplier — the smaller the GDOP, the better the geometry, and the less the measurement error is amplified. When deploying Anchors, ensure their spatial distribution is uniform and avoid placing all Anchors in a line or clustering them in one corner.
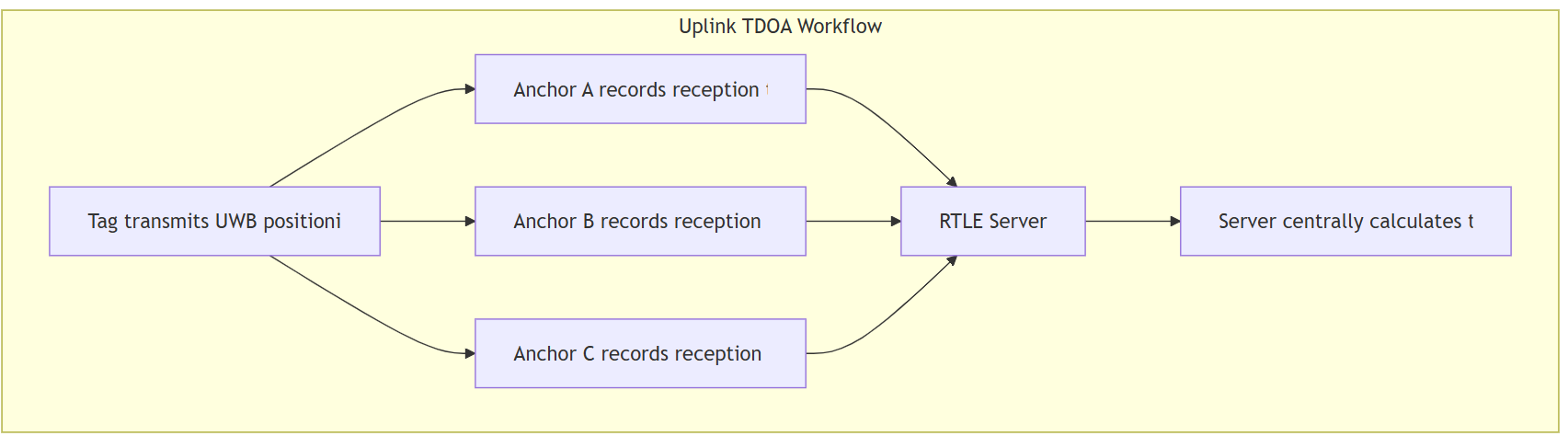
Uplink TDOA Data Flow
The process described above is the Uplink TDOA principle. The specific data flow is as follows:
- The Tag transmits a UWB data packet
- Multiple Anchors receive this packet and each records a reception timestamp
- Each Anchor sends the packet content and its reception timestamp over a network (Ethernet/WiFi) to the RTLE (Real-Time Location Engine) — positioning calculation software running on a server
- The RTLE calculates the Tag’s position based on the timestamp differences across Anchors and the known Anchor coordinates
Typically, Uplink TDOA coordinate calculations are performed centrally by the RTLE, and the Tag itself does not participate in the computation.
Clock Synchronization — The Foundation of TDOA Systems
As we’ve established, coordinate calculation requires knowing the time differences of signal reception across Anchors. The Tag sends its positioning packet at one definite moment, but the timestamps recorded by each Anchor when they receive this packet must be based on the same time reference to be meaningfully compared and subtracted.
Why is Clock Synchronization Necessary?
Under normal circumstances, each Anchor’s UWB chip uses its own independent crystal oscillator to drive its internal timer. Due to manufacturing tolerances (crystal frequency tolerance, load capacitance variation, chip internal circuit differences) and environmental changes during operation (temperature, voltage, and humidity fluctuations), each UWB chip’s internal counter runs at a slightly different frequency.
Even if calibrated at the factory, after some runtime the timestamp discrepancies between different devices will grow increasingly large. UWB positioning demands nanosecond-level timing accuracy (1ns ≈ 30cm), so even minuscule frequency deviations (on the order of parts per million, or ppm) will accumulate to unacceptable levels in very short periods.
A Real-Life Analogy: Everyone has experienced this — a wall clock and a wristwatch, even if set to the same time on the same day, will show a discrepancy of several seconds or even tens of seconds after just a few days. UWB chip crystal oscillators behave the same way.
Let’s do a quick calculation: Assume two Anchors have a crystal frequency difference of 5ppm (very common for ordinary crystals). The UWB chip’s reference frequency is approximately 499.2MHz. A 5ppm deviation means the frequency difference between the two chips is approximately 499.2 MHz * 5 * 10^(-6) = 2.496 kHz. The accumulated time offset per second is approximately 5 * 10^(-6) s = 5 us. A 5 microsecond offset corresponds to a distance error of 5 * 10^(-6) * 3 * 10^(8) = 1500 meters! In other words, without clock synchronization, after just 1 second, the timing discrepancy between two Anchors is enough to cause a 1,500-meter distance error.
Another vivid example: In a running race, if each athlete is timed with a separate stopwatch, but each stopwatch runs at a slightly different speed — even if they all read “10.00 seconds,” the fast stopwatch hasn’t actually measured a full 10 seconds, while the slow one has measured more. These results obviously can’t be fairly compared.
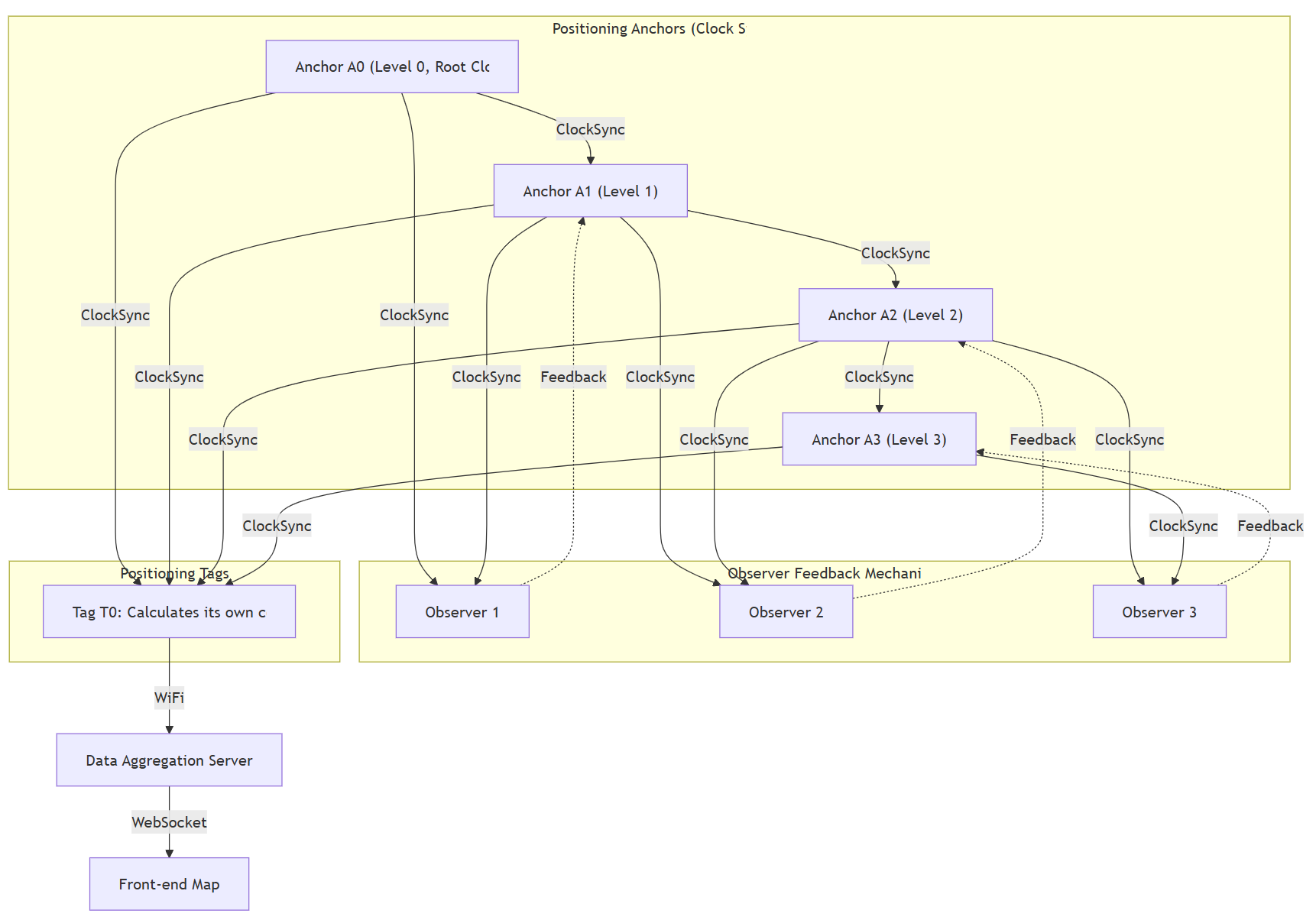
The Basic Approach to Clock Synchronization
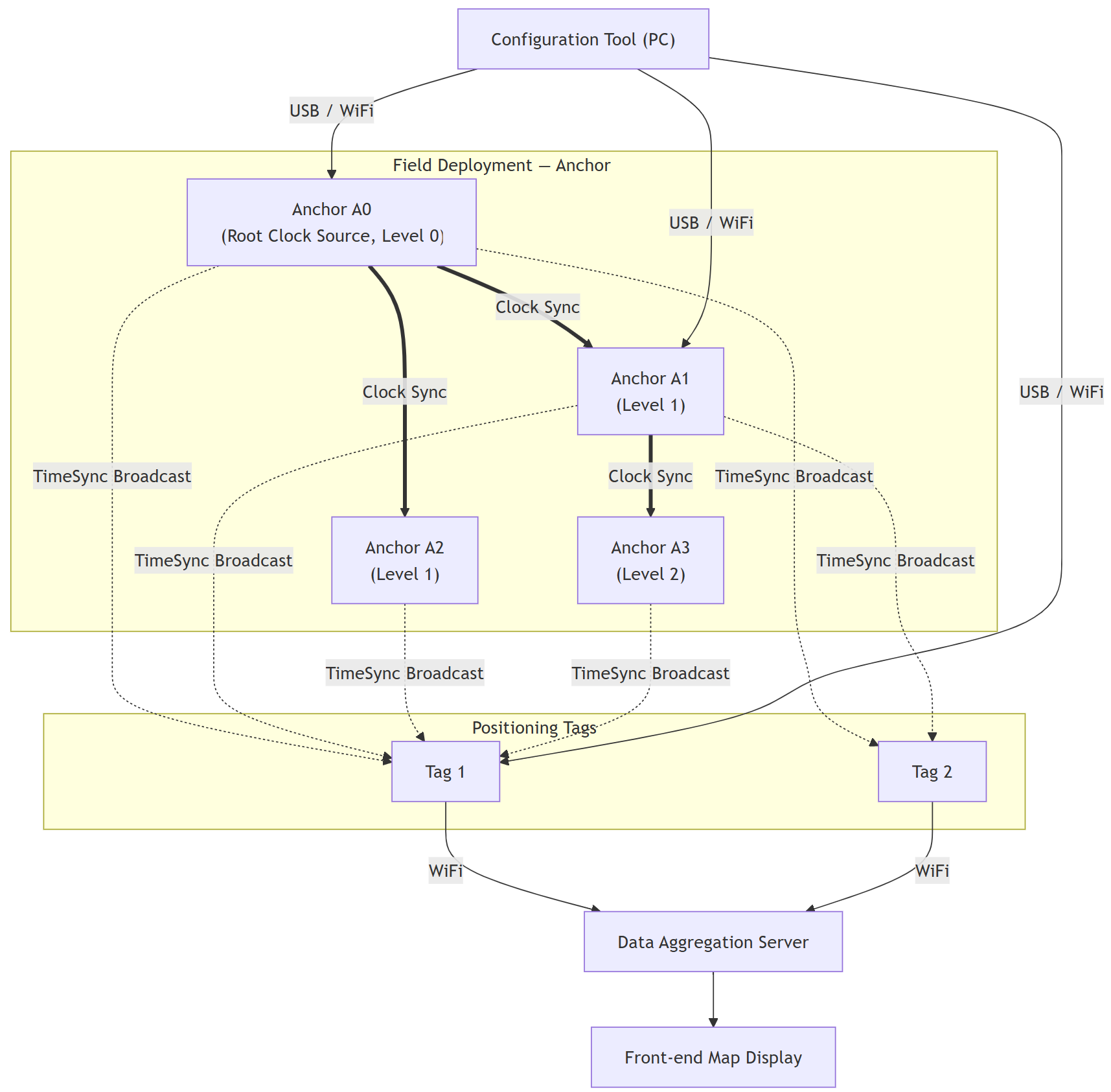
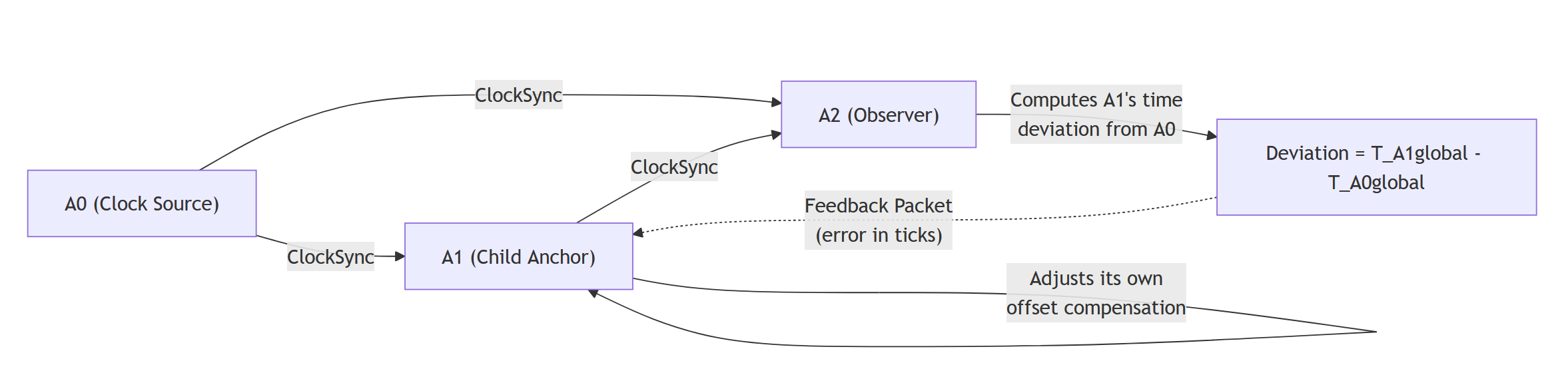
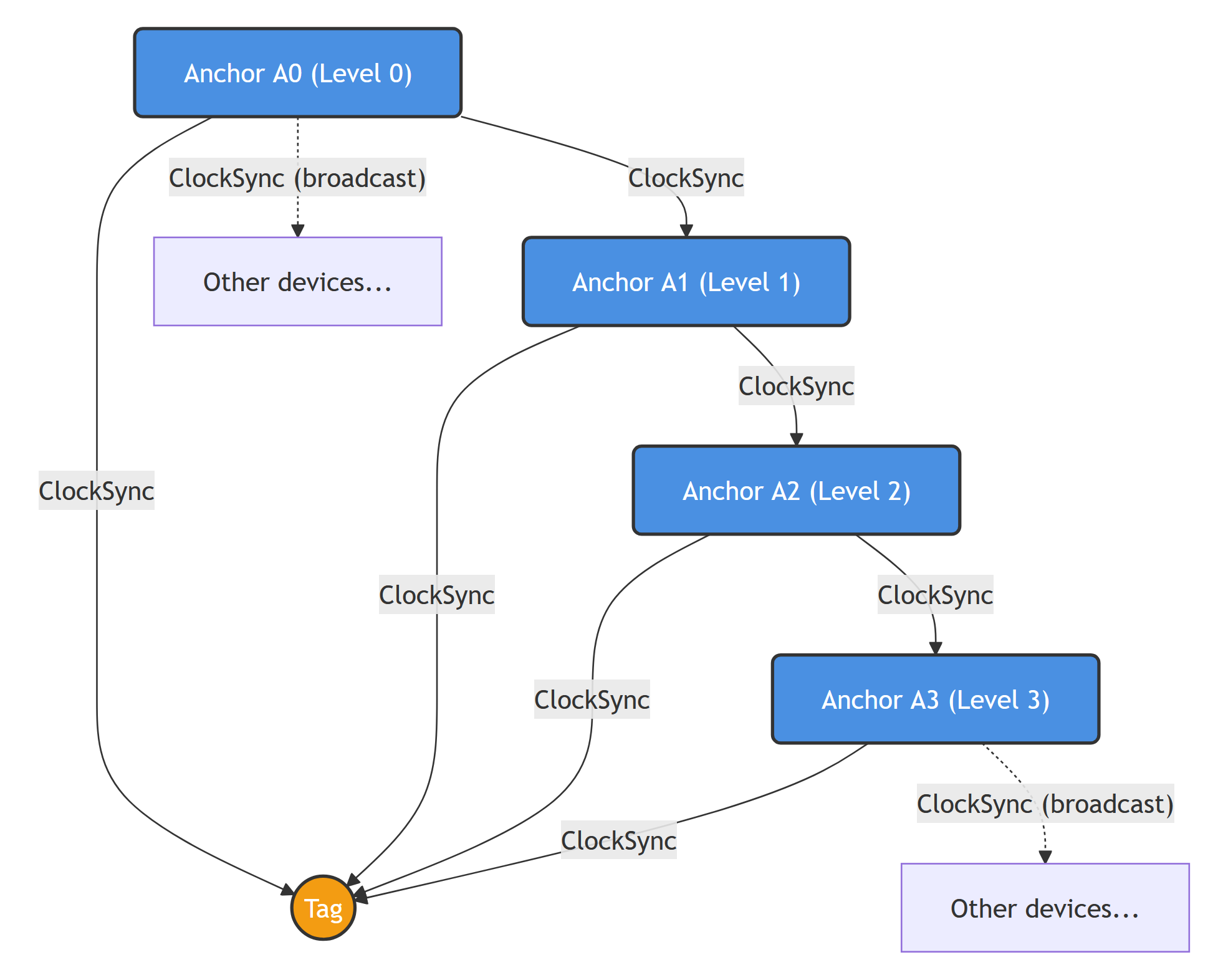
Typically, one Anchor is designated as the Root Clock Source (also called the reference Anchor). It periodically transmits clock synchronization signals (TimeSync packets). Other Anchors receive these synchronization signals and use algorithms to internally maintain a “Global Time” consistent with the clock source. We call this process Clock Synchronization.
Strictly speaking, “clock synchronization” and “time synchronization” are different concepts — “clock synchronization” focuses on making device clock frequencies consistent (frequency synchronization), while “time synchronization” focuses on making time values consistent (phase synchronization). However, in this article we don’t distinguish rigorously — our goal is for each Anchor to maintain an accurate Global Time so that our software can convert between any Anchor’s/Tag’s Local Time and Global Time.
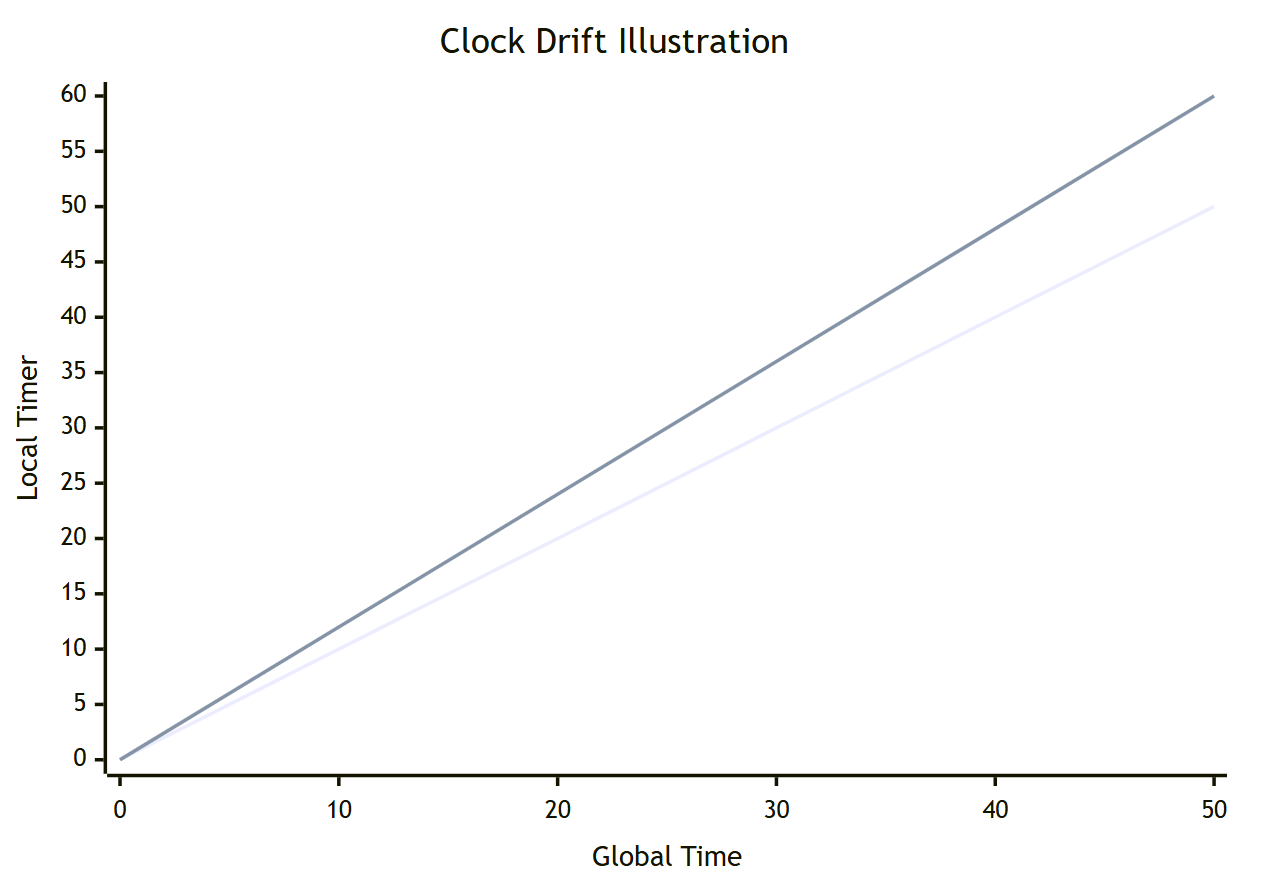
Local Time vs Global Time:
- Local Time: The raw reading of a specific UWB chip’s internal timer. Each chip has its own independent local time.
- Global Time: A unified time based on the clock source. Through clock synchronization parameters, any Anchor/Tag can convert its local time to Global Time.
Downlink TDOA
As we know, in Uplink TDOA, the Tag transmits the positioning signal and all Anchors receive it. We simply subtract the Anchors’ Global Time timestamps of receiving the signal to get the time differences.
Downlink TDOA is more complex: each Anchor actively transmits positioning packets (called TimeSync packets), and the Tag records the timestamps of receiving these packets, then “figures out” the time differences.
Why Can’t We Simply Subtract?
The reason is that a Tag’s UWB receiver typically has only one channel and can only receive one signal at a time. Since each Anchor transmits its TimeSync packet at a different time, the Tag naturally receives them at different times. Because the transmission times differ, we cannot simply subtract the Tag’s local timestamps of receiving each packet to get the time difference — these timestamp differences contain both the desired distance-difference information and the Anchor transmission time differences, all mixed together inseparably.
Tag “Locking” onto Anchors
To solve this problem, the Tag needs to perform a locking operation on each Anchor. “Locking” is essentially the Tag performing clock synchronization with a specific Anchor. Through locking, the Tag maintains “Global Time” information derived from that Anchor internally. This enables the Tag to convert its local time to that Anchor’s corresponding Global Time at any moment.
More precisely, by continuously receiving TimeSync packets from a specific Anchor, the Tag estimates the frequency offset (skew) and time offset between its own local clock and that Anchor’s global clock. With these two parameters, the Tag can convert any local timestamp to that Anchor’s corresponding Global Time.
Once the Tag has locked onto multiple Anchors (e.g., 4), for any specific local timestamp tlocal, the Tag can convert it to 4 separate Global Times _ t(G,1), t(G,2), t(G,3), t(G,4) _ corresponding to each Anchor. Since the Tag’s distance to each Anchor differs, these 4 Global Times will differ — subtracting them pairwise yields the Time Difference of Arrival (TDOA).
Why Does This Method Successfully Isolate the Distance Difference?
The key lies in the physical meaning of “Global Time.” Imagine the Tag asking: “If all Anchors simultaneously sent signals to me right now, how long would each signal take to arrive?” Through clock synchronization parameters, the Tag can map its local time to each Anchor’s Global Time. Due to different distances, the differences between these mapped times precisely reflect the flight time differences caused by distance differences.
The following flowchart compares the workflows of Uplink TDOA and Downlink TDOA:
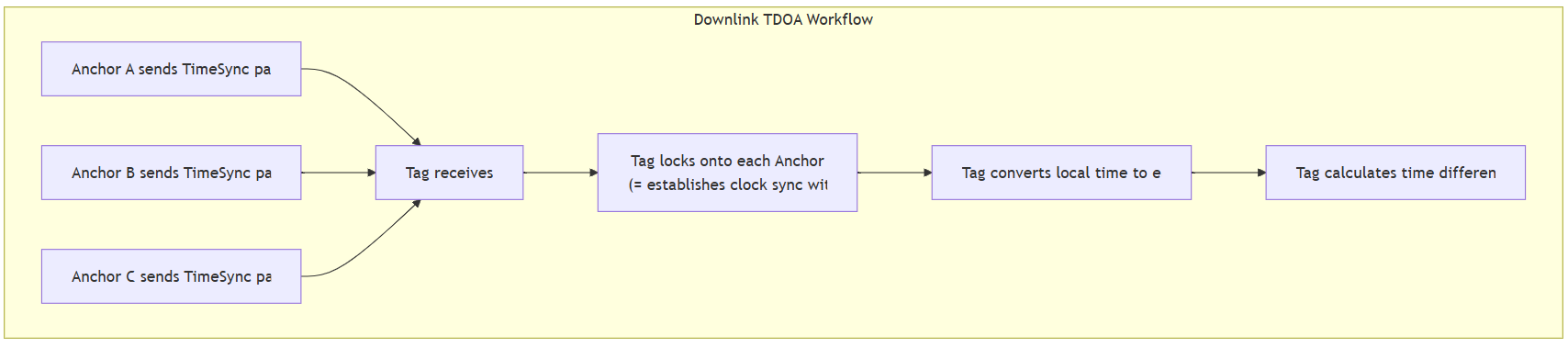
We will explain “Clock Synchronization” and “Locking onto Anchors” in more detail in later chapters.
1.3 Uplink TDOA vs Downlink TDOA
The comparison between Uplink TDOA and Downlink TDOA is shown in the following table:
| Comparison Item | Uplink TDOA | Downlink TDOA |
|---|---|---|
| Positioning signal sender | Tag transmits | Anchors transmit |
| Positioning signal receiver | Anchors receive | Tag receives |
| Clock sync occurs between | Anchors only | Anchors + Tag-to-Anchor |
| Clock sync precision req. | Moderate-high precision | Extremely high precision required |
| Coordinate calculation | Centralized on a dedicated server (RTLE) | Tag calculates locally (no server needed) |
| Tag power efficiency | Very power-efficient (sleeps, periodically wakes to transmit) | Higher power consumption (must stay in receive mode continuously) |
| Tag hardware cost | Very low (minimal functionality, only needs to transmit) | Higher (needs larger RAM and more capable MCU for calculations) |
| Infrastructure cost | Requires a dedicated server for the location engine | No dedicated positioning server needed; lower total cost |
| System capacity/scalability | Tag contention increases with count; needs TDMA/FDMA management | Anchors broadcast; Tag count has no theoretical limit (receive-only) |
| Privacy | Coordinates calculated on server; Tag cannot keep its location private | Coordinates calculated locally on Tag; Tag can choose not to report |
Supplementary Note — System Capacity:
In Uplink TDOA, every Tag needs to transmit signals over the air. When the Tag count is high, the UWB channel becomes crowded, and packet collisions may occur. Complex TDMA (Time Division Multiple Access) or FDMA (Frequency Division Multiple Access) mechanisms are needed to manage air-interface resources — for example, assigning each Tag a specific transmission time slot, or having Tags use random backoff algorithms (similar to WiFi’s CSMA/CA). Even so, when the Tag count reaches hundreds or thousands, the system’s update rate and reliability will significantly degrade.
In Downlink TDOA, Anchors periodically broadcast TimeSync signals, and Tags only receive without transmitting. Therefore, the number of Tags has theoretically no upper limit — you can deploy any number of Tags in the same area without them interfering with each other. This is a very significant advantage of Downlink TDOA in large-scale deployment scenarios (such as large warehouses, stadiums, and shopping malls).
Supplementary Note — Privacy:
Downlink TDOA has another often-overlooked advantage: location privacy. Since coordinates are calculated locally on the Tag, the Tag can choose not to report its position to any server. This is important in certain privacy-sensitive application scenarios (such as military applications or personal tracking devices).
1.4 Technical Key Points of Downlink TDOA
Readers who have followed my previous article series should have a basic understanding of TDOA technology and know that clock synchronization and coordinate calculation are the two core technical challenges. Let’s now analyze what special technical requirements Downlink TDOA has in these areas.
1.4.1 Clock Synchronization — The Greatest Challenge of Downlink TDOA
Downlink TDOA demands significantly higher clock synchronization precision than Uplink TDOA. This is the most critical challenge in Downlink TDOA system design. Here’s why:
In Uplink TDOA, all Anchors receive the same signal transmitted by the same Tag at the same moment. Although each Anchor’s timestamp is based on its own local clock, the clock synchronization error only affects the computation of timestamp differences — and this error is “common-mode” to some extent, partially cancellable through differential computation.
In Downlink TDOA, however, each Anchor transmits signals at different times, and the Tag must use clock synchronization parameters to convert its local timestamps (recorded at different reception times) into each Anchor’s Global Time. Clock synchronization errors are directly and fully superimposed onto the final time differences. For example:
- If the clock synchronization error between Anchors is 1 nanosecond, this translates to approximately 30 centimeters of positioning error
- If the sync error is 3 nanoseconds, the error approaches 1 meter
- If the sync error is 10 nanoseconds, the system becomes essentially unusable
Therefore, Downlink TDOA typically requires sub-nanosecond (<1ns) clock synchronization precision.
1.4.2 Multipath Propagation and First Path Detection
We know that during radio wave propagation, obstructions and interference can prevent the receiver from getting a signal, or the received signal may not come from the First Path — the direct line-of-sight propagation path.
What is Multipath Propagation?
Theoretically, radio waves travel in straight lines (this is the physical basis for radio-based positioning). In practice, however, radio waves exhibit multipath propagation. This means that the signal from transmitter to receiver may travel along many paths:
- First Path (Line-of-Sight, LOS): Direct straight-line transmission, the shortest path, arriving earliest — this is the only path we want for positioning
- Reflected paths: Signals bouncing off walls, ceilings, and floors before reaching the receiver
- Diffracted paths: Signals bending around the edges of obstacles to reach the receiver
- Scattered paths: Signals encountering rough surfaces or small objects and scattering in multiple directions
Only the First Path corresponds to the true straight-line distance. All other paths have longer transmission distances and later arrival times.

Legend:
- Red solid line: The First Path from transmitter to receiver — shortest path, most accurate timing
- Gray dashed lines: Multipath signals reflected/diffracted off walls and objects — longer paths, later arrivals