I’ve been doing some experimentation with my MDEK1001 kits (I have 2 kits). I’ve put 16 anchors in my house, with six on the upper floor and ten on the main floor.
In some places, I get what I consider really decent performance. In other places, the performance is terrible. Each of the following was gathered over a 30 second span, with the tag not moving.
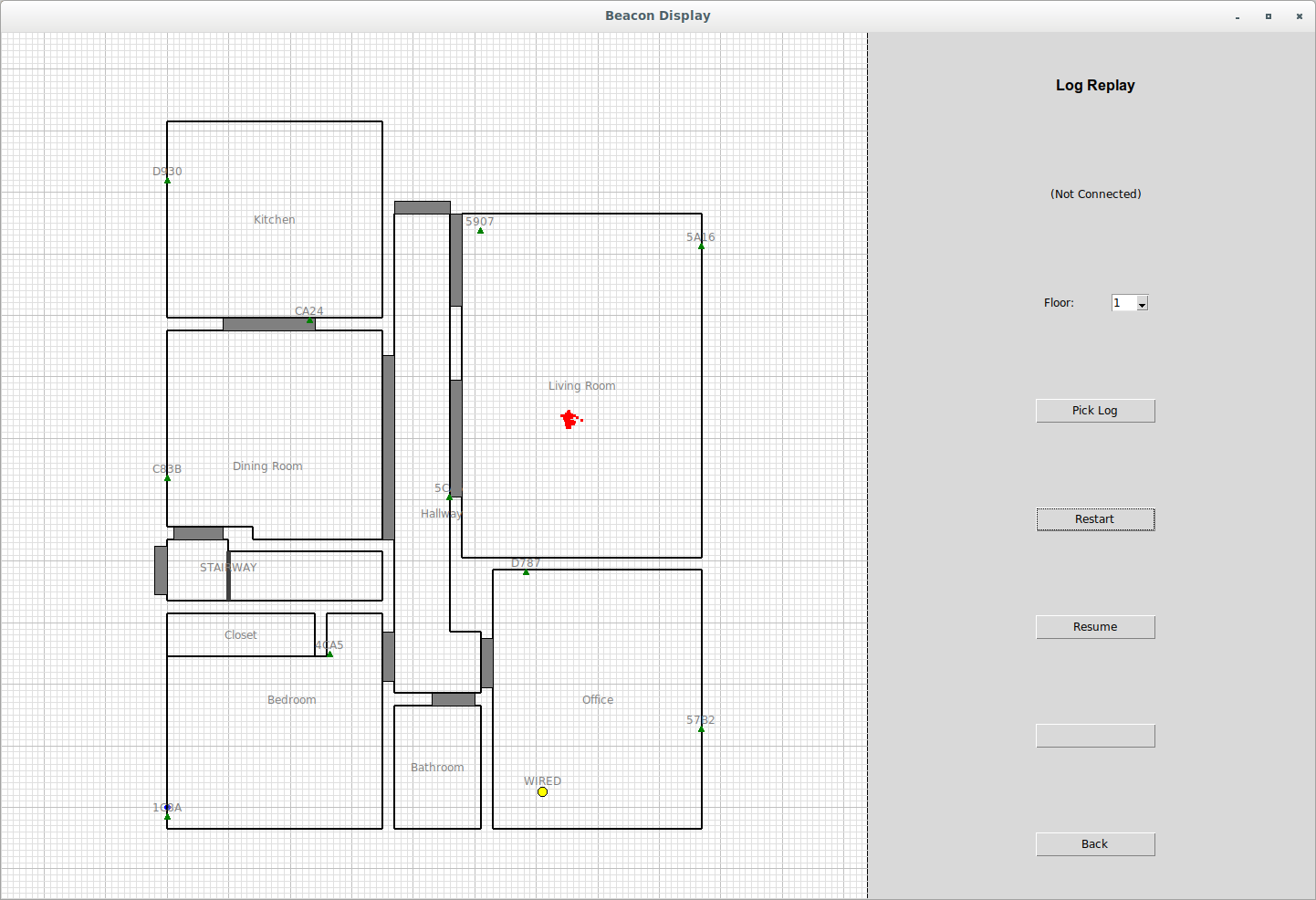
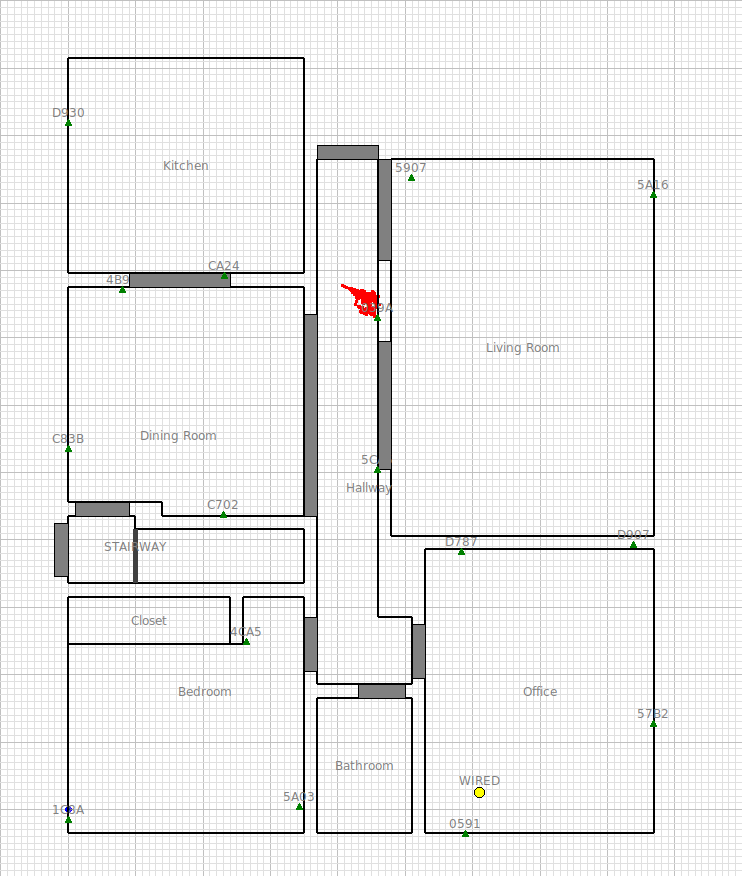
Here’s an example of a good place:
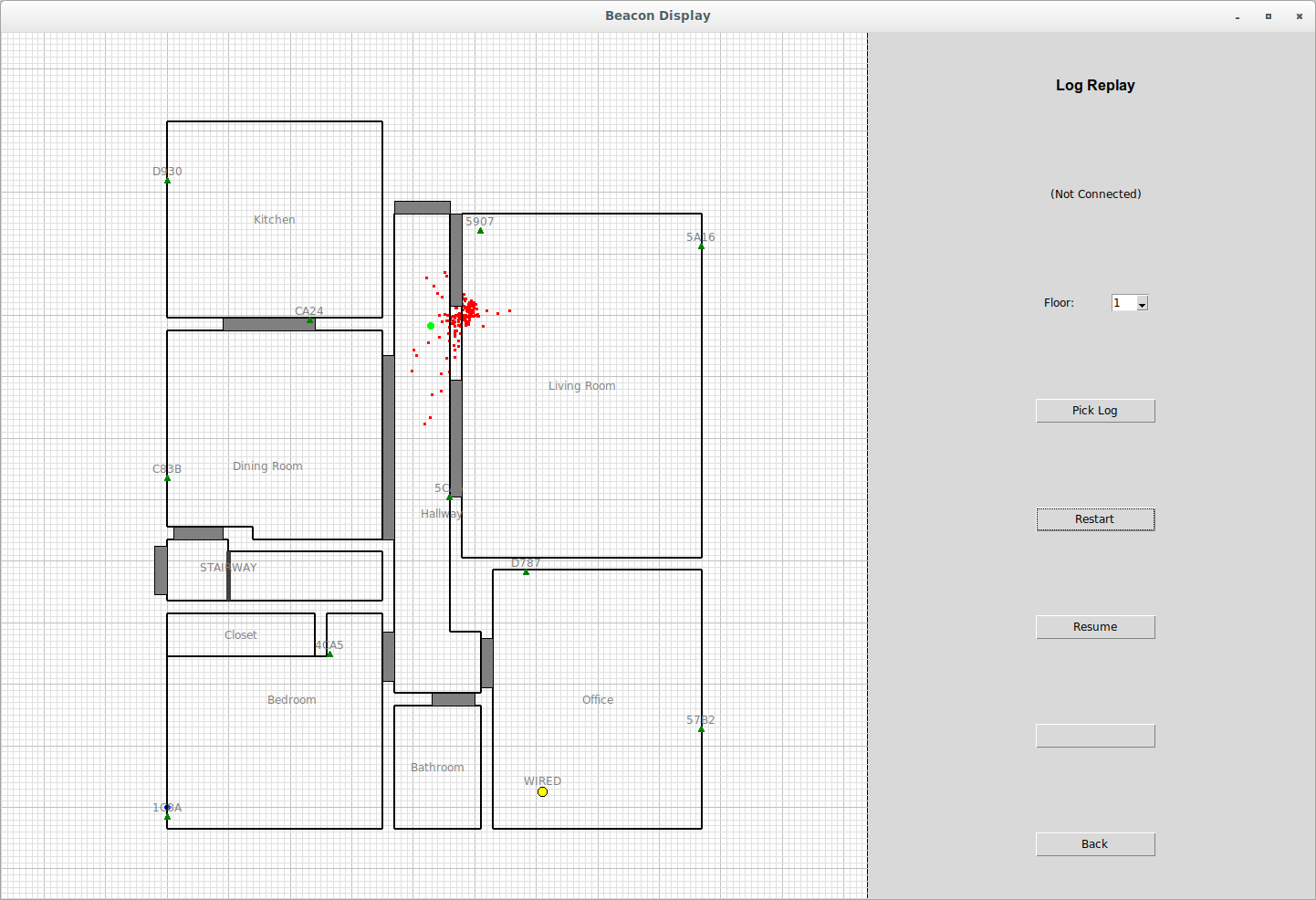
Here’s one only a couple meters away (the green dot is roughly where the tag was):
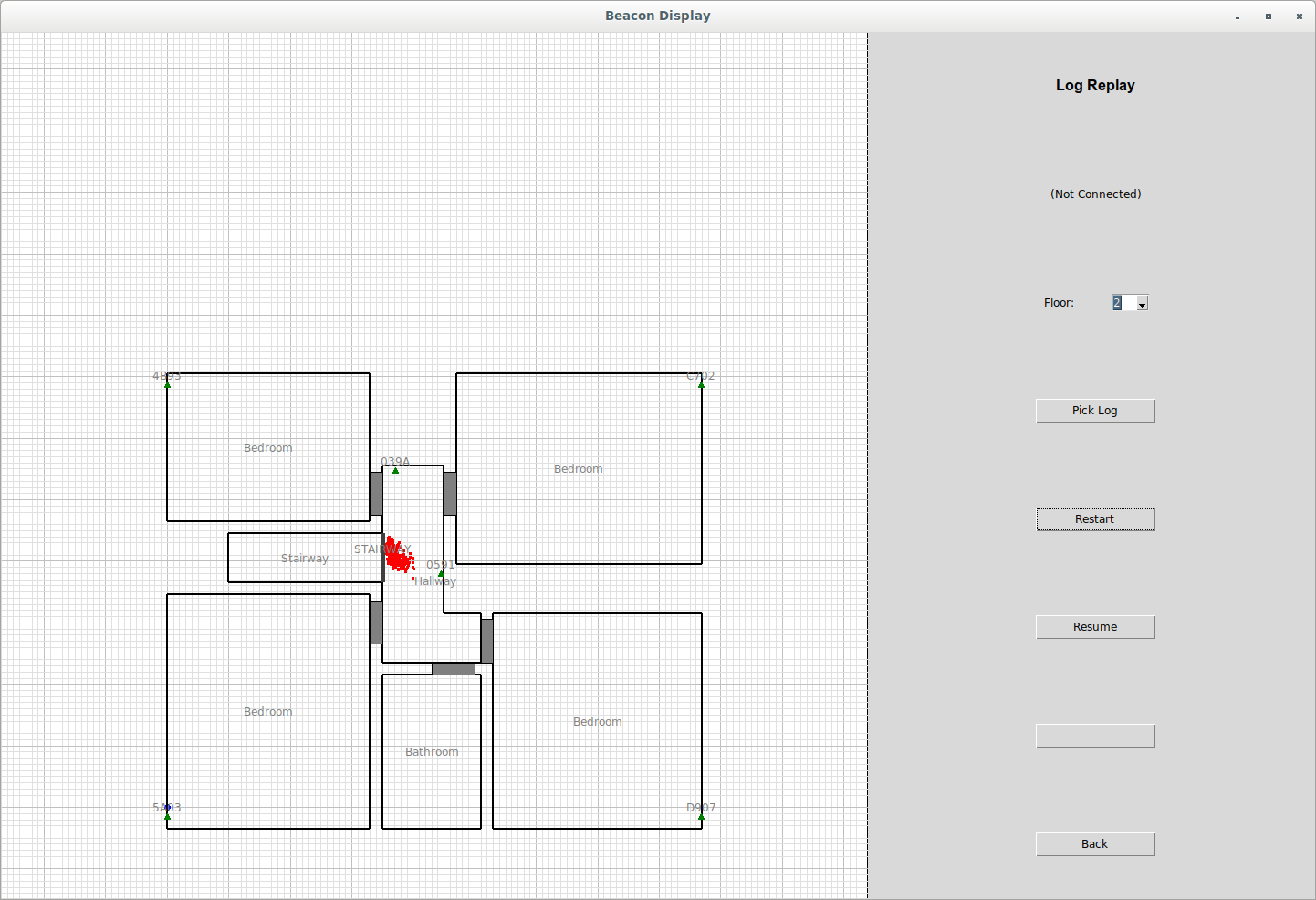
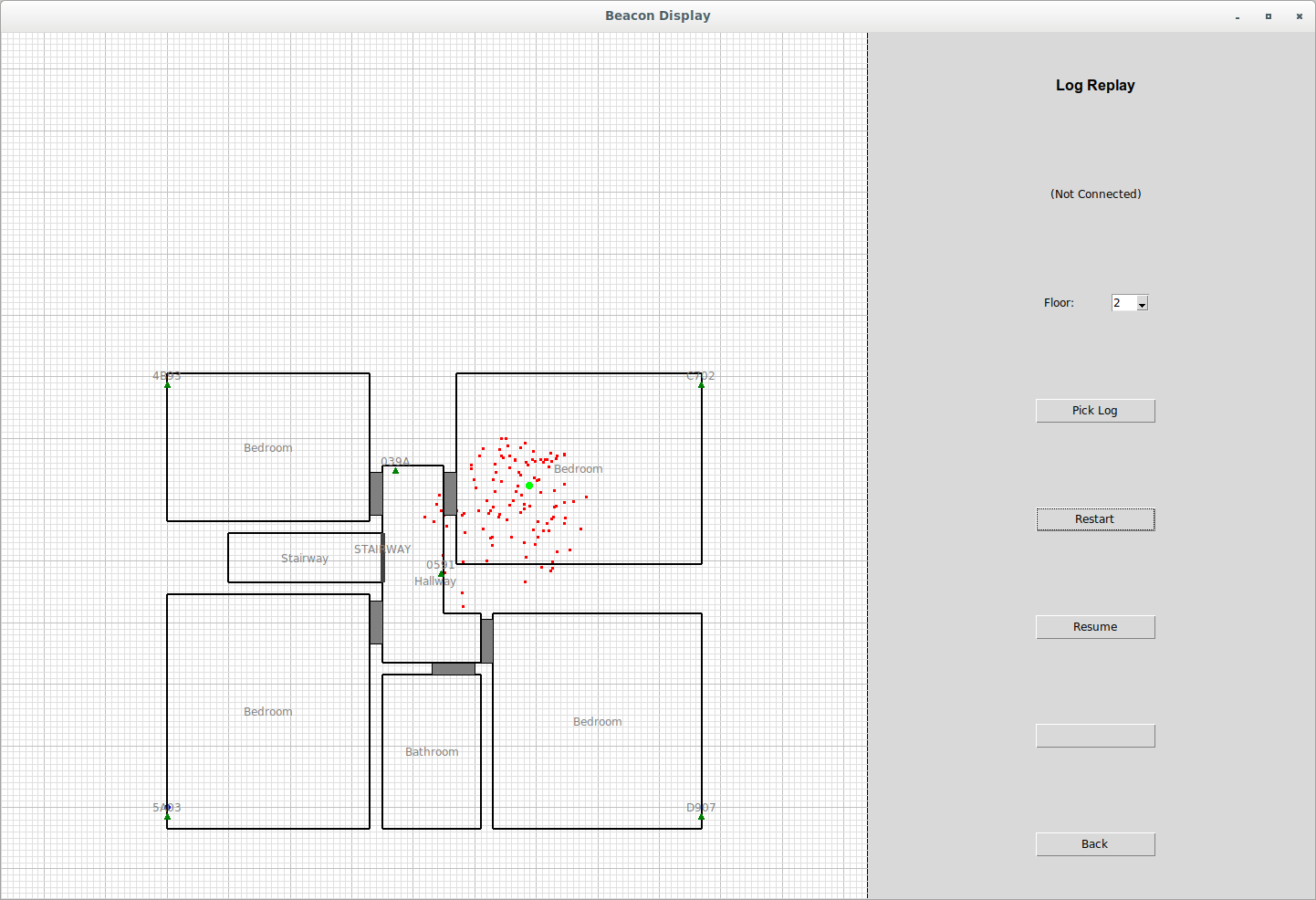
Similarly, here’s a couple on the upper floor
The small grid is 10cm, the larger slightly darker grid squares are one meter.
The anchors on the main floor at all set at 2.2 meters off the floor, and the anchors on the 2nd floor are set at 1.9 meters. All the anchor positions have been calculated manually using a laser tape measure, and checked and re-checked for accuracy.
Any ideas on how I can improve this?
Thanks,
Jon
Hi Jon,
Nice little gui you came up with. Which framework are you using ?
Regarding your issue could you please log the data out of the tag to see which anchor each tag is ranging with ?
I suspect that on the upper floor, the tag may be ranging with some anchors from the lower level. I think it could explain why the results are poor there (the range through the floor are probably inacurate due to NLOS).
It is difficult to cover such building as they consist in numerous small room with strong NLOS conditions. In the next release, the system will support 30 anchors in dense area, so you will effectively be able to add 4 anchors per room and that should provide the best performance.
Yves
The GUI is written in Python with Tkinter.
I’m going to do some more experimentation tomorrow, moving all the tags to the main floor, and see how it works. I’ll update here. I’m also doing some analysis on the tag->anchor distances, to see what they look like.
Thanks,
Jon
Hi,How do you coordinate the use of 16 base stations at the same time? I have recently been working on the development of multiple base stations. Can you exchange them?
Thank you
Hi Lei_Ding,
Jon is using our PANS software which allow to deploy a quick UWB RTLS network. Please have a look at MDEK1001 on our website. The source code is not provided for this product.
Yves
So I moved the six upstairs tags to the main floor, and got much better results.
This was a re-do of the second test I showed in my first post above. It seems that having some anchors on the second floor really messes up the positioning. We did some analysis of the anchor distances from each anchor, and as long as the anchor and the tag are on the same floor, we get decent results. The variance goes way up crossing the ceiling/floor boundary. The variance is super-tight if there is direct line of sight between the anchor and the tag.
Hi Jon, did you manage to join two kits and setup as one network?
Yes, I did. You can use 16 anchors and as many tags as you want (although right now I’m only using one tag). Each kit comes with 12 beacons, so two kits gives enough plus a bunch extra.
hey jon could you share some of your code in python for the Gui?
Unfortunately, Google (my employer) looks down on that sort of thing. Its pretty basic stuff, just using the canvas capabilities in Tkinter to draw lines and ovals and polygons, and building some python classes to keep track of the objects I’m displaying.
thxs anyway
will look into it