Hey guys, I simply plotted the accumulator values (samples) around the first path index to visualize the CIR. After tinkering the values together I got a typical CIR plot. So far so good…I have several questions.
Could anyone explain, what the values represent? Or better: What are the unit of the values? I know it indicates power or energy (area under the curve) but these are only qualitative statements. (same applies to F1, F2, F3 and peak amplitude - IP_DIAG2 …4 and IP_DIAG0) - And yes, all of these values have to be casted as float and divided by 4 which is discussed in another thread due to 2 fractional bits. (a right bit shift twice is also sufficient) This information is missing in the register section in the Manual.
Back to the topic that leads me to the Channel Impulse Response Power C (section 4.7.2 in the User Manual). We can get the value from register IP_DIAG1. But same question as above: What does the value represent? The Manual says: “This 17-bit field reports the channel area in the CIR accumulated using the preamble sequence. This gives a measure of the receive power of the preamble.” Can we give it a unit?
The values vary from 5 (hand over one antenna) to 25 (5-10cm distance between two modules) and they react very delayed. So it would be interesting how the value is calculated or measured…Does anyone know?
Thank you so much!
Thanks a lot for your question Fourier, how much I know related to response power I am sharing with you -
Channel and Signal Models
Consider an information [bearing signal] with a lowpass equivalent band-width of |f| < 1/2T Hz sent through a channel with [coherence bandwidth] ≪ 1/T Hz, and corrupted by [additive noise]. Assume the channel can be modeled as a linear [FIR filter]. Then, using the familiar baseband discrete-time equivalent representation for all quantities (by employing the Karhunen-Loève expansion; see, for example, [1]) the received sample measured at time k is given by
(1)r(k)=Nf−1∑m=0fm(k)d(k−m)+n(k)
where the (unknown) transmitted data symbols {d(k )} (with rate 1/T symbols/s) are drawn from a memoryless, finite [alphabet source]. This measurement model is illustrated in Figure 1. The bandlimited noise sequence {n(k)} is assumed to be white, i.e., E[n(k)n*(l)]=σ2nδk,l where σ n2 is the noise variance and δ k,l is the [Kronecker delta] function, and it has a circular Gaussian p.d.f.
The channel impulse response is of length Nf, and the coefficients {fm(k)} represent the convolution of the transmit filter, the actual communication medium, and the whitening matched filter (WMF) [1]. Also note that perfect synchronization, or equivalently, sampling of the matched filter output at the optimum times is implicitly assumed in Eq. (1).3 It should be mentioned that when the ISI channel is unknown, the WMF in Figure 1 cannot be accurately defined. However, by assuming a high [signal-to-noise-ratio] (SNR) condition, an approximate WMF can be constructed from the [autocorrelation function] of the received signal. Basically, I have used this methodology on my project HRMS for the retail sector. Synchronization is achieved by performing a peak-detection test on the [autocorrelation sequence].
In the development of the [Kalman filter] channel estimator, it is assumed that the coefficients {fm(k)} evolve according to the following complex Gaussian autoregressive (AR) process model:
(2)fk+1=Ffk+wk
where the channel [parameter vector] is
(3)fk=f0k,f1k,…,fNf−1kT,
F∈CNf×Nf is a one-step [transition matrix], and wk∈CNf is a zero-mean circular [white Gaussian noise vector] with [covariance matrix] Q∈CNf×Nf. Assuming a [diagonal matrix] for F, Eq. (2) can be viewed as a fading [multipath channel] model. The value of F determines the [Doppler spread] or coherence time of the channel; i.e., small diagonal entries of F yield fast channel fades, and thus a large Doppler spread (or small coherence time [1]). The stability of the AR model is ensured by proper choice of the transition matrix F; for example, if Q = 0.0001I, we may choose F = 0.999I or F = 0.995I, etc.
We define the following notation. The cumulative measurement sequence up to time k is denoted by
(4)rk=rk,rk−1,…,r0,
and similarly the cumulative ith data sequence is
(5)dik=dik,dik−1,…,di0
where i = 1,…,M k + 1 (M is the size of the source alphabet; e.g., M = 4 for QPSK). A subsequence of length Nf is defined by Gaussian.
Hope this thing will help you.
Thanks for your try @jamiebiswas . But maybe it would have been better if you just posted the link to the resource https://www.sciencedirect.com/topics/engineering/channel-impulse-response instead of copy & paste the content with unformatted formulas 
I have had the same question. Obtaining the samples and reading the registers as indicated in section 4.7.2 of the manual, an estimation of the received power can be obtained. But regarding the CIR samples, beyond their method of obtaining them, what units can we apply to those samples? What is the relationship with the impact of the DGC?
BR
Hi @DrFourier ,
It is a nice nickname and quite related to this topic. ![]()
It is possible to calculate RSSI(dBm) ( Received Signal Strength Indicator) by looking at the CIR and DGC index. DGC is adjusting the gain of the receiver chain with a 6 dB step size therefore, we obtained an empirical formula by using three sample points on CIR and DGC index.
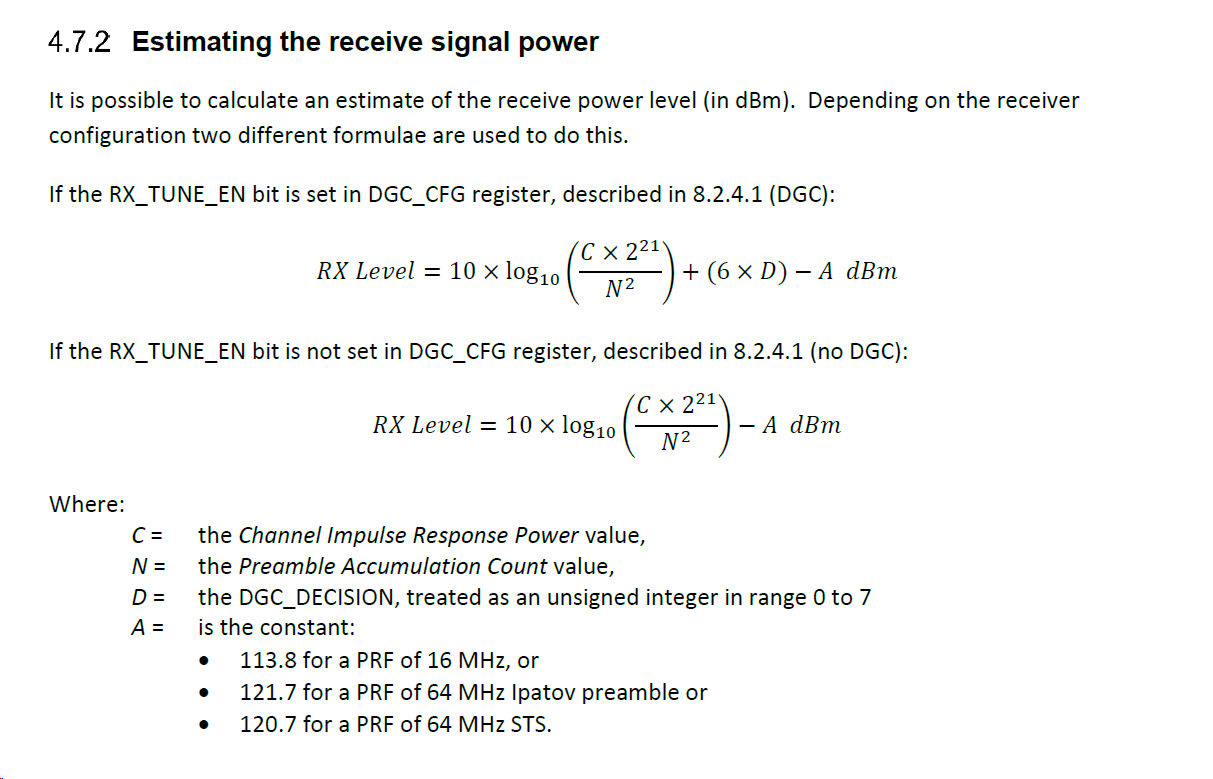
You can find more information in the DW3000 User manual in Section 4.7.2. about these formulas.
Kind regards,
Emre
Hi @anon71839214.
Thanks for your reply and your reaction to my nickname ![]()
Calculating the RSSI is no problem.
My question from 2 years ago was about the units of a CIR plot or the cumulative values, which still hasn’t been answered.
Sorry for the delayed answer.
You can consider the CIR amplitude value as a relative magnitude and it is not possible to translate it to a certain power or amplitude unit. We accumulate that data to accurately estimate time stamps and consequently determine the location precisely.
CIR response is also often used as a debug feature to understand if there is any issue in ranging or RF performance.
Ok, thank you Emre ![]()