There is very little guidance on what accuracy and precision one can get depending on anchor density, channel, and smoothing. We’ve been testing our CUWB system in our lab for these factors and here is some data on that. The CUWB system is based on the QM33110W chipset and uses the QM14068 LNA for extended range.
We used 3 anchor counts, 6, 12, and 24. This is in a medium size room about 8 by 20 meters, so pretty dense at 24 anchors. This was clear line of sight conditions, so pretty much ideal. The tag was in the center of the room, again also ideal.
We used two channels, 5 and 9 (PRF 64, preamble length 64, preamble code 11).
We used 3 levels of smoothing: none, 10, and 100. Our smoothing is a sliding window, so at 100 Hz, there is a new position every 10 ms that is smoothed over the last N samples. At 100 smoothing, that would be the last 1 s of samples at any given point.
Here are the results in these two files (click for larger view) The charts are all +/- 25 cm from ideal (about +/- 10 inches).
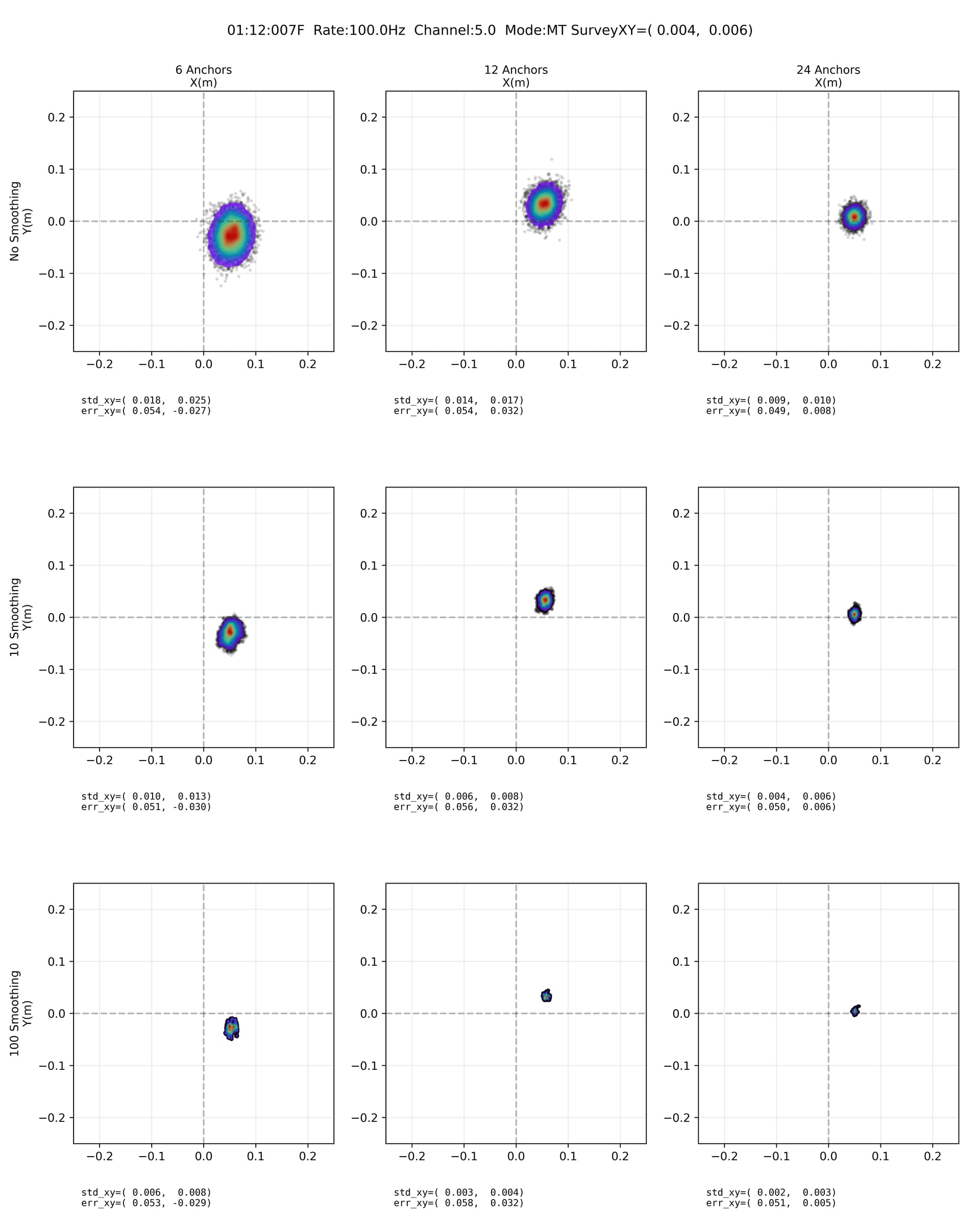
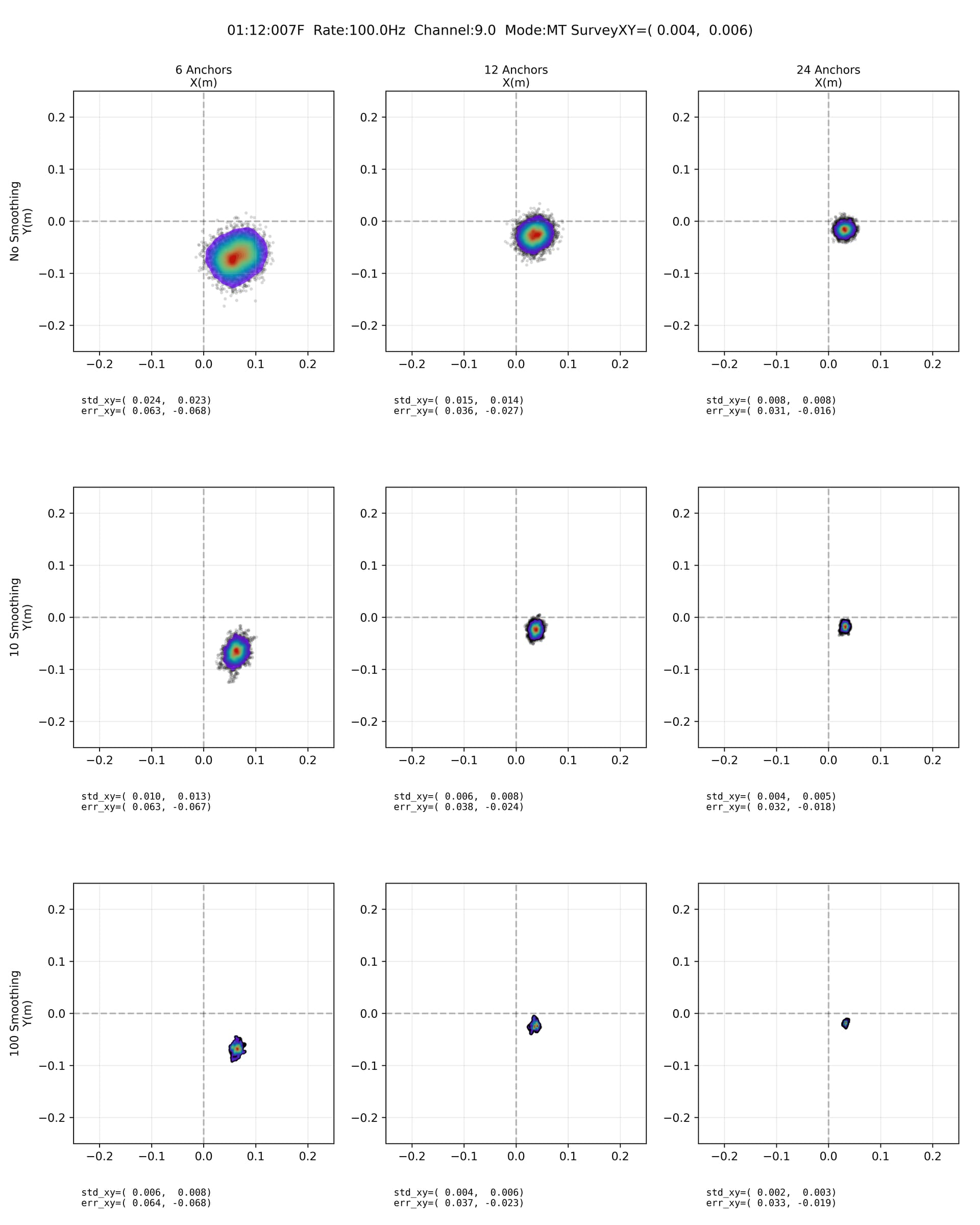
The plots are only XY plane. Z axis is less accurate in general for an anchor array in one plane on the ceiling. The tag is at the (0,0) point in all these images as surveyed by a total station.
With no smoothing and 6 anchors, the worst case in these plots, the position std dev was 2.5 cm or less for both ch 5 and ch 9. With 24 anchors and 100 smoothing, a “ridiculous mode”, the std dev was 3 mm or less. Overall Accuracy was well within 10 cm.
Our location algorithm consumes data from all anchors that heard a tag, processing them simultaneously in one pass of the algorithm. There is no practical upper limit, so the system can get more and more precise with adding anchors.
The basic take away is that even at low anchor density and no smoothing, the system is quite accurate and precise, suitable for many applications. Higher anchor densities improve accuracy and precision, and will make the system more robust to occlusions and anchor failures.
There is a tradeoff between anchor count and smoothing. To some degree, using a higher tag update rate that is subsequently smoothed can allow an install with fewer anchors. It isn’t quite equivalent because smoothing won’t deal with occlusions as well, and it does consume more battery and air time.
Hopefully you found this data useful. At the very least, it demonstrates what can be achieved in a well designed RTLS system based on the Qorvo chipset.
–
Mike Ciholas, President, Ciholas, Inc
3700 Bell Road, Newburgh, IN 47630 USA
mikec@ciholas.com